Рёлоход

- Автор(ы): Кирнева Кристина
- Научный руководитель: Екимовская А.А., cтудентка, техник, 2-й курс, Московский авиационный институт, Аэрокосмический факультет (Институт №6)
- Учебное заведение: МБОУ "СОШ №12", кружок "Юный физик - умелые руки", г. Королев, Московская обл.
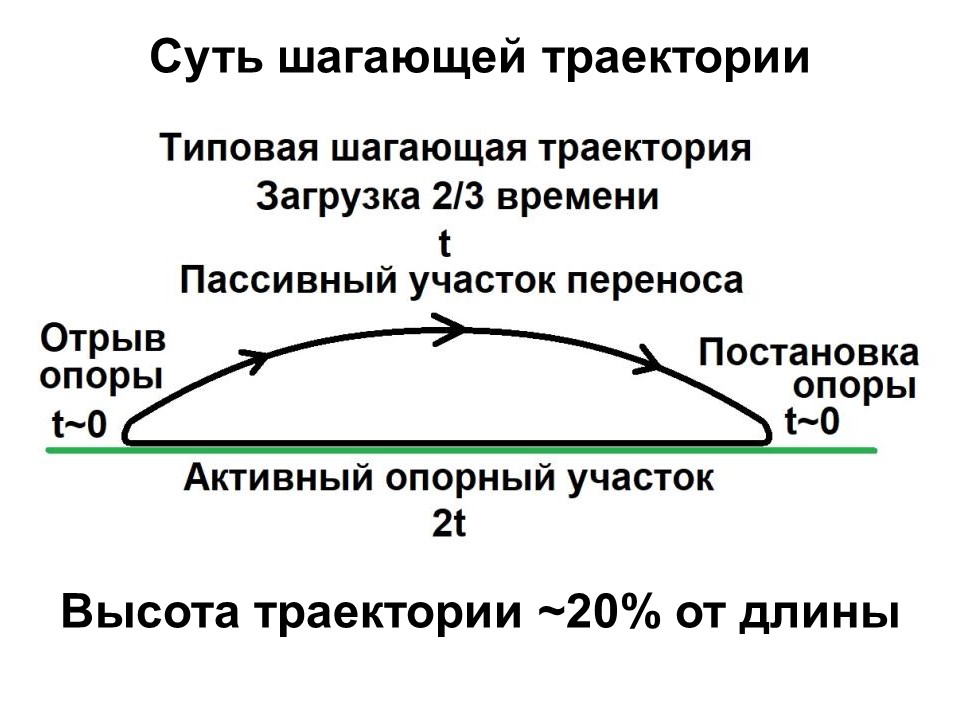
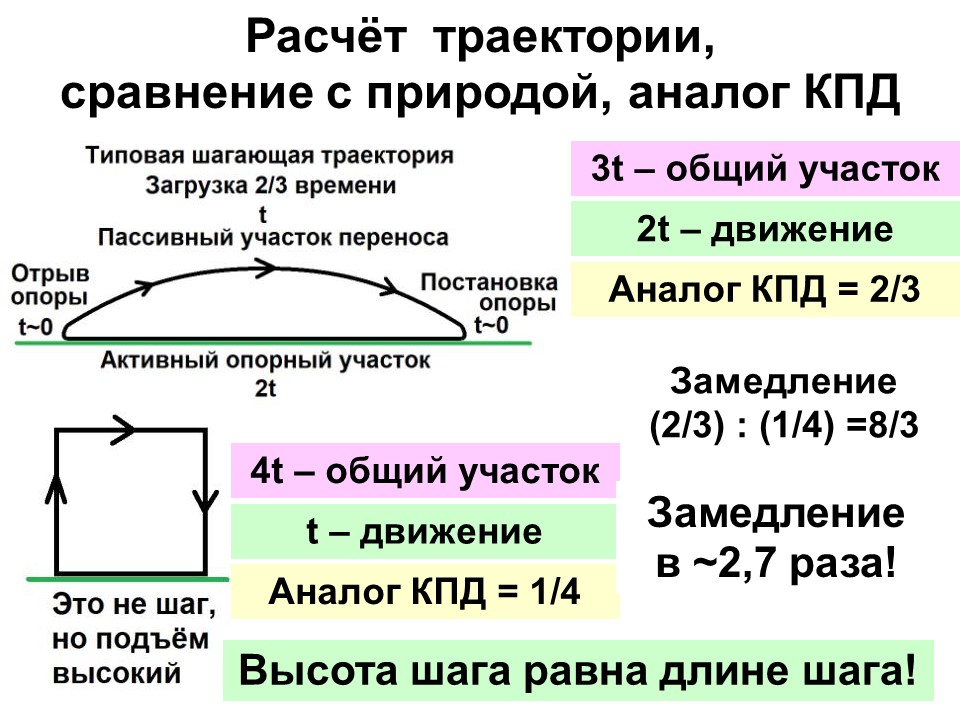
Природная шагающая траектория состоит из четырёх участков. На активный участок приходится приблизительно 2/3 времени, на перенос опоры 1/3. Такое соотношение характерно для всей живой природы. Например, по такому же ритму работает сердце человека: систола, диастола, пауза. Это соотношение изучал Николай Иванович Иванцик при создании медицинских механизмов. Новизна этой работы заключается в исследовании двух участков траектории, почти мгновенных, на которые обычно не обращают внимания. Однако именно на этих участках человек спотыкается.
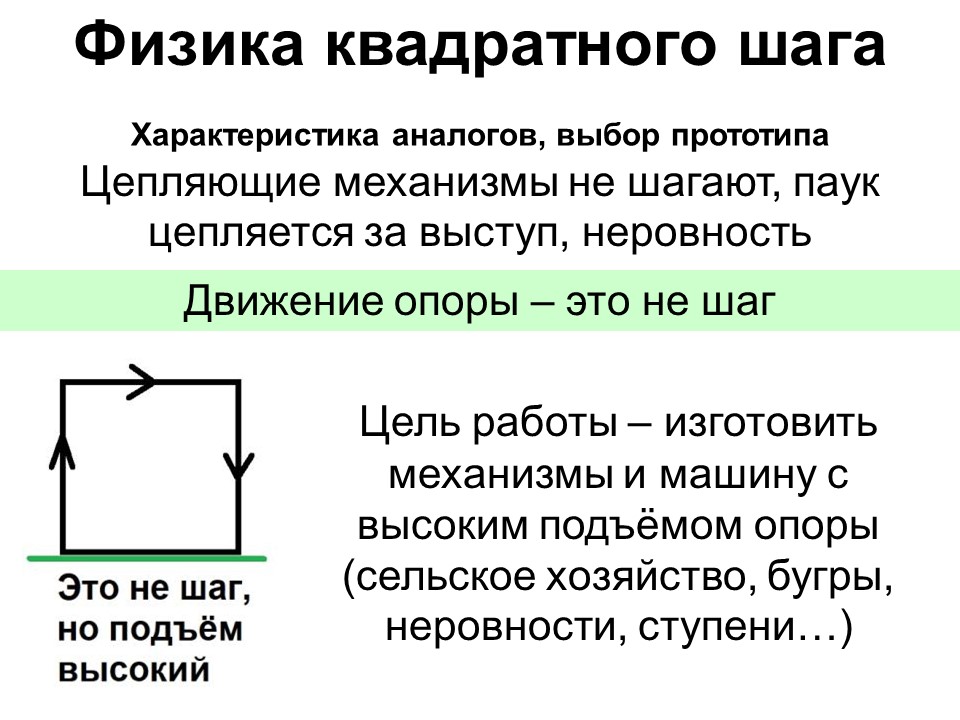
Цепляющие механизмы в этой работе не изучаются, хотя они актуальны, например, для горной местности. У шагающей траектории есть один самый главный недостаток – очень низкий подъём опоры, низкая высота шага. Но вместе с этим есть величайшее преимущество – вертикальные постановка и подъём опоры. Это важно не только для экологии, но и для жизни в широком понятии. Всегда ли нужна шагающая траектория. В Волгоградском университете была изготовлена машина-робот для сельского хозяйства с высоким подъёмом стопы и квадратной рабочей траекторией опоры. Но управлялась машина процессором. Цель работы – повторить компьютерный вариант механическим способом.
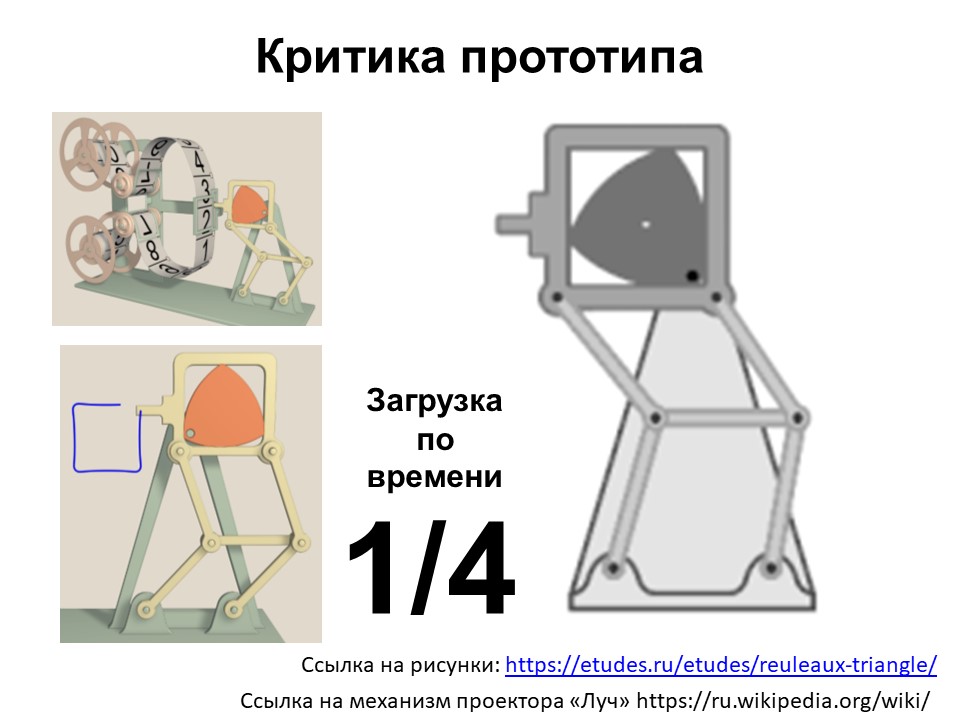
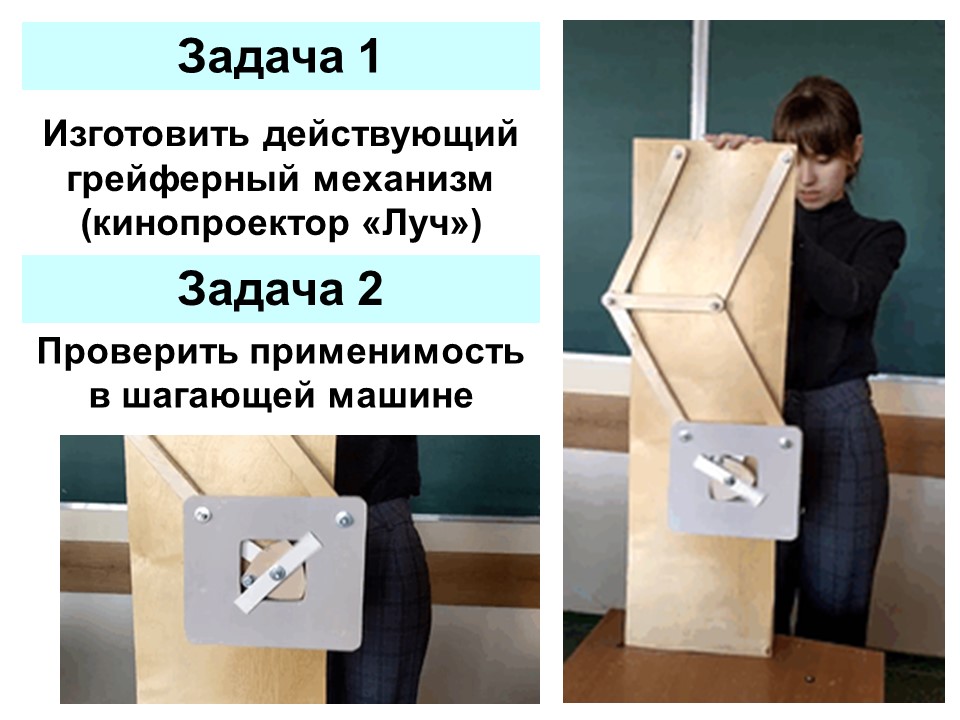
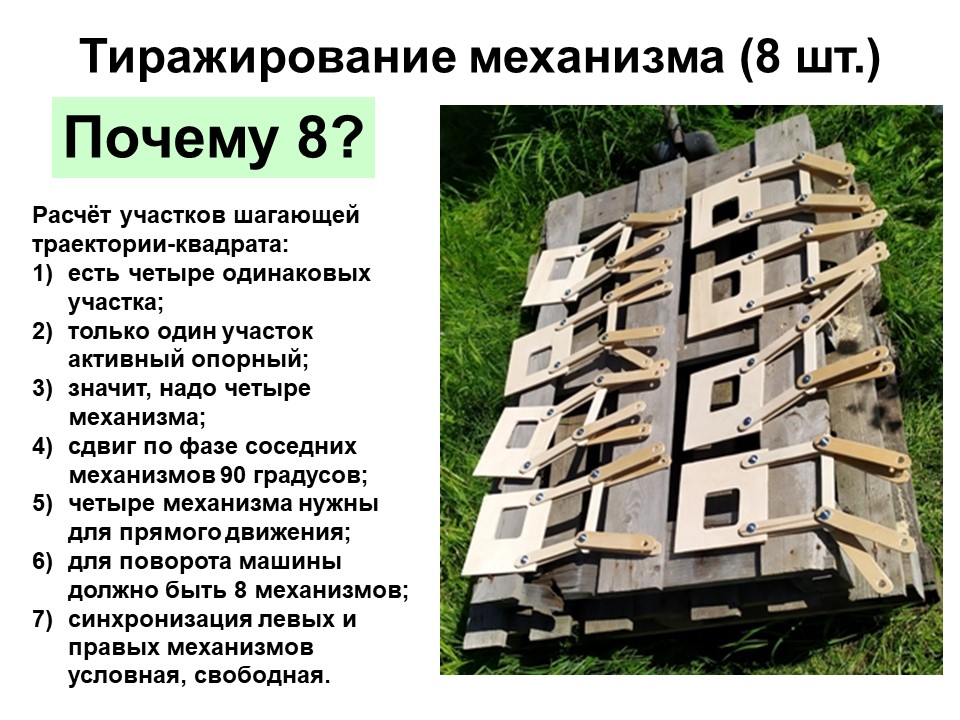
В качестве прототипа для новой шагающей машины был выбран грейферный механизм, причём простейший, от кинопроектора «Луч». Этот механизм основан на кривой постоянной ширины, на треугольнике Рёло. Однако сразу появилась трудность. Продолжительность активного участка всего 25% времени цикла. Для постоянной опоры понадобится, как минимум, четыре механизма. Но ведь автомобиль тоже на четырёх колёсах. Потребовалось провести эксперимент.
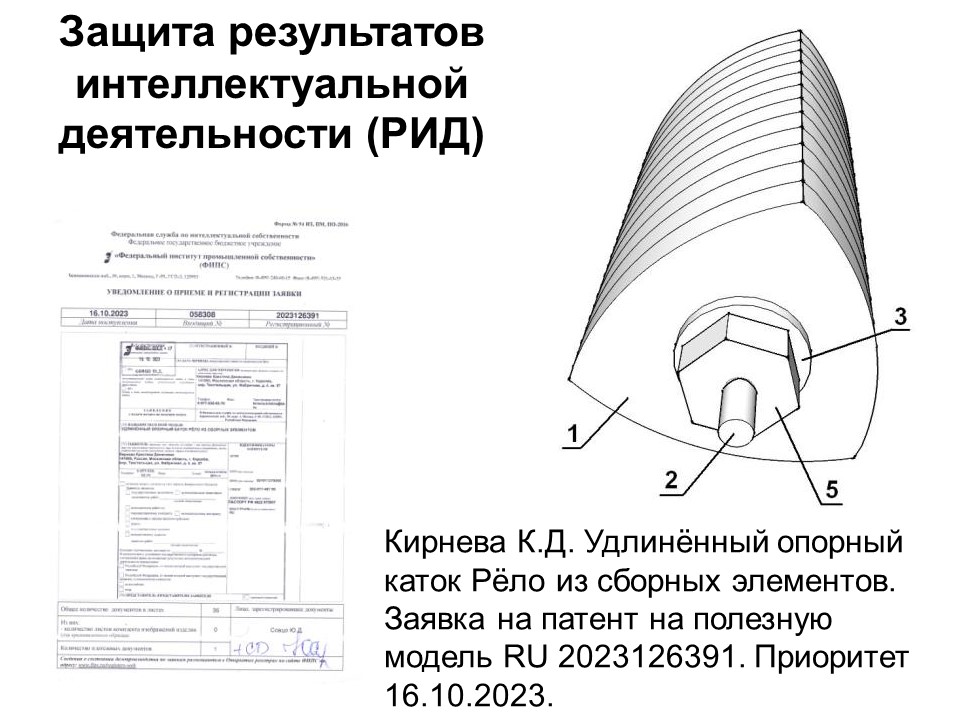
Опыт работы с треугольником Рёло есть. Первой созданной автором установкой были катки Рёло для перемещения тяжёлых грузов. В работе было отмечено, что треугольнику Рёло находили только три применения: сверло Уаттса для квадратных отверстий, роторный двигатель «Мазда» и грейферный механизм кинопроектора «Луч». Авторским направлением работы определены ещё четыре новых направления: рёлокаток, рёлоподшипник, рёлогусеница и рёлоход. Здесь обсуждается третье направление.
Натурные испытания доказали правильность предложенного технического решения. Мотоблок из двух сборок по 4 механизма способен поворачивать, изменять направление движения. Высота шага большая, 50 мм при теоретической ширине кулачка Рёло 70 мм, но практической детали 50 мм. Высота шага равна длине шага. Правда, чем-то приходится жертвовать. В этой машине скоростью. Стопоходящая машина П.Л.Чебышева очень медленная, а Рёлоход движется медленнее её в 8/3 раза. Но зато проходимость повышена.
Ссылка на видеоролик:
https://youtu.be/zy05I59UxXs