Разработка универсального робота-помощника для ухода за растениями в парке
- Автор(ы): Болденко Илья
- Научный руководитель: Ковалева Н.А., педагог дополнительного образования
- Учебное заведение: МУДО ЦДО "Истоки", г. Электрогорск Московская обл.
Актуальность: на сегодняшний день одной из главных забот по уходу за растениями в парках, скверах, аллеях и других местах отдыха горожан является подкормка и защита растений от разного рода вредителей и болезней. Средства для обработки зеленых насаждений должны обеспечивать эффективность и точность внесения растворов.
Цель проекта: создать универсального робота-помощника, который сможет без участия человека ухаживать за растениями. В том числе, исключить участие человека при использование вредных для него веществ.
В процессе работы над проектом были изучены существующие устройства распыления и механизмы ухода за растениями. Среди них было мало роботизированных устройств. Для реализации своей идеи были подробно рассмотрены модели Микотон и самоходная колесная платформа. Объединив две идеи, была разработана собственная колесная платформа и рабочий механизм.
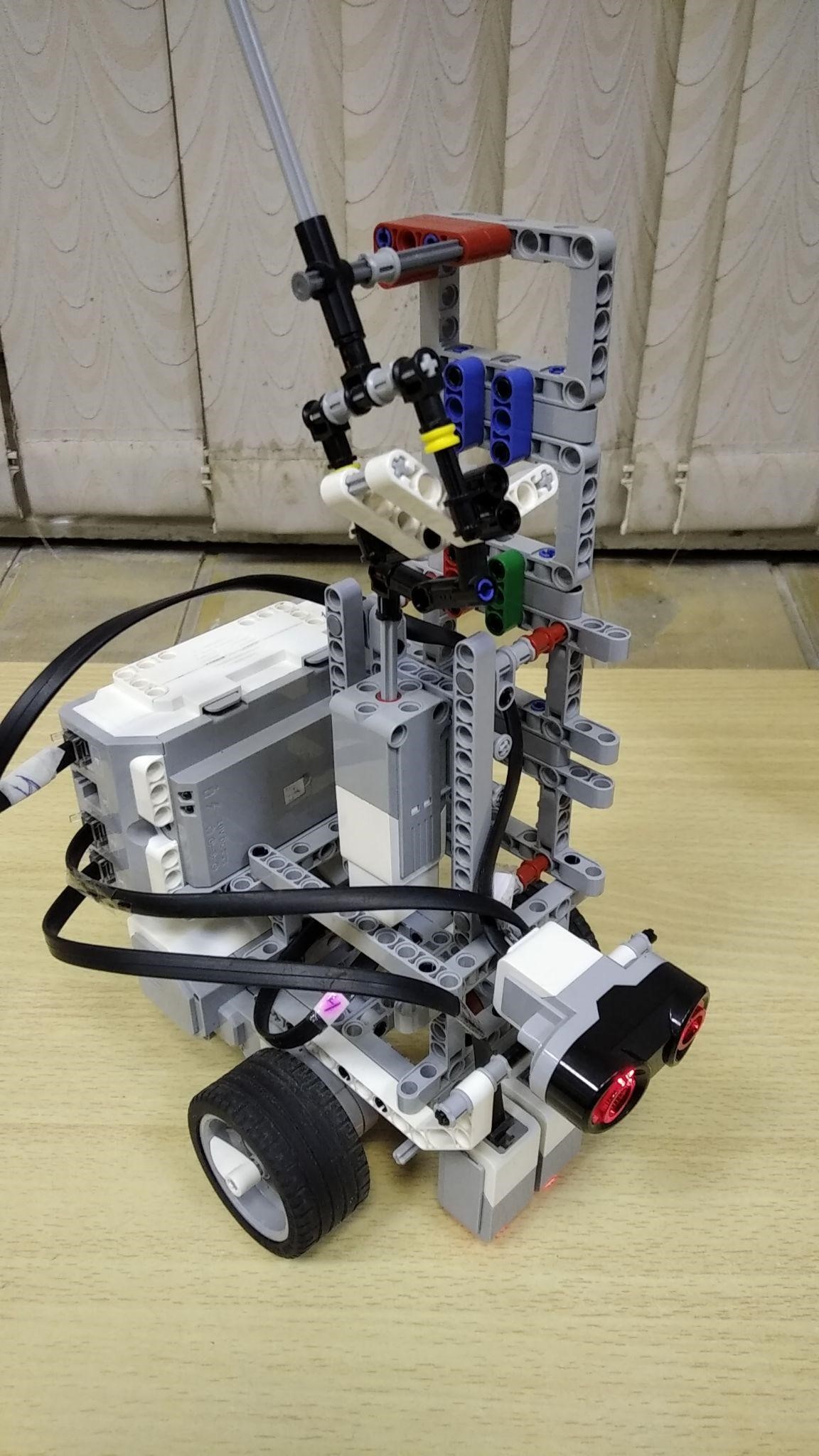
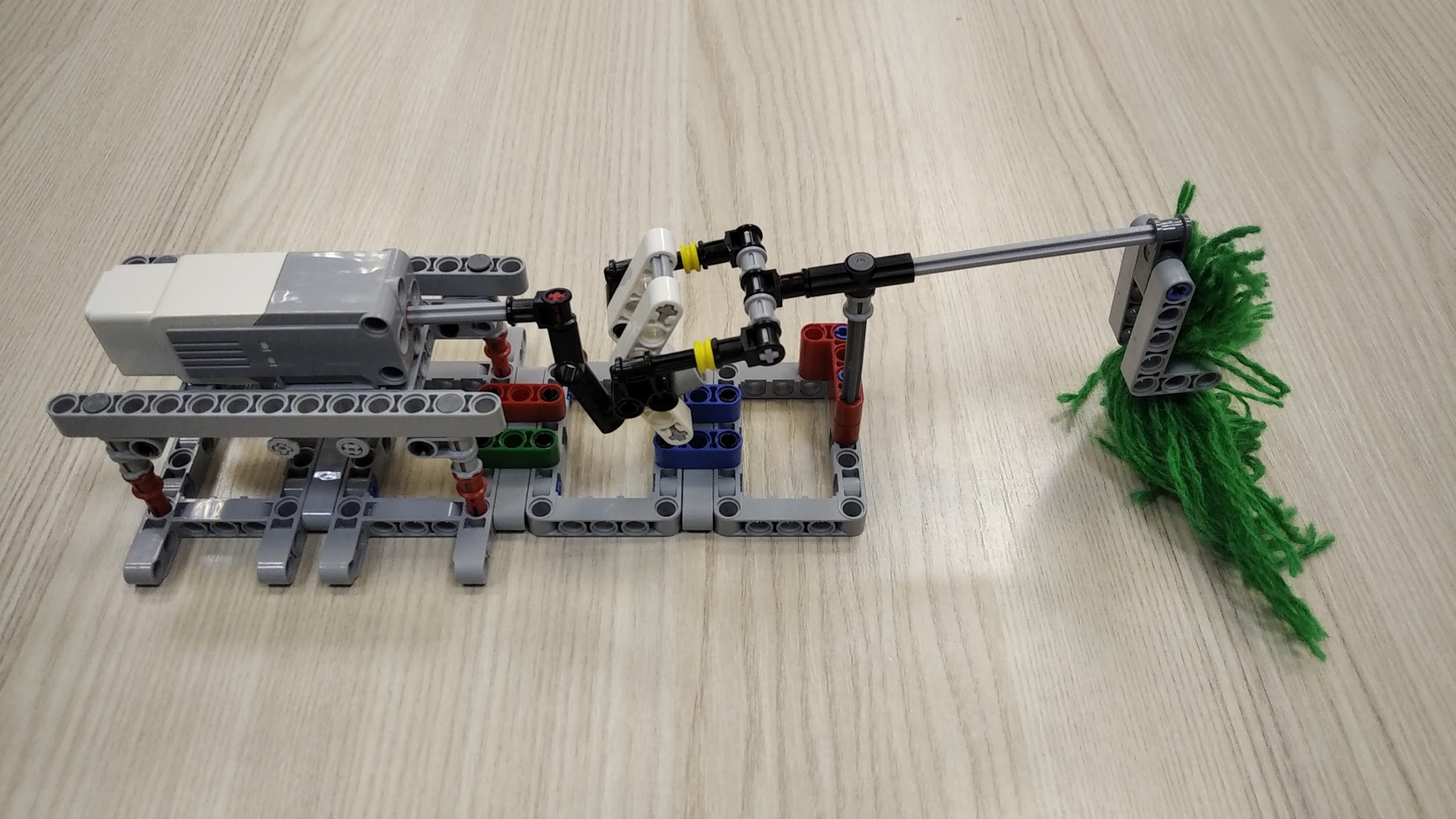
Робот состоит из колесной платформы, штанги опрыскивателя, места установки бака, куда заливается средство. На штангу устанавливаются шланг с форсунками для обработки деревьев и кустарников. Конструкция опрыскивателя подвижная, штанга приводится в движение средним мотором, который запускает шарнирный механизм, преобразуя вращающиеся движение мотора в линейное движение штанги. Рабочий механизм может быть установлен горизонтально тогда появляется возможность обрабатывать траву, и робот может служить как уборщик дорожек парка.
Алгоритмы автономной работы робота: робот едет по заданной траектории, где необходимо произвести обработку. С помощью ультразвукового датчика происходит обнаружение объектов, после того как объект обнаружен, включается рабочий механизм и происходит обработка дерева. В алгоритме движения робота заложен объезд объектов, это позволяет сэкономить время на обработку одного дерева и провести обработку со всех сторон.
Проектирование подобных роботизированных устройств требует учета габаритов машины и рабочего органа, грузоподъемности, величины дорожного просвета, расчета максимальной и минимальной скоростей, тип двигателя и других важных характеристик.