Робот-манипулятор
- Автор(ы): Прокофьев Константин
- Научный руководитель: Козлова Е.А., учитель математики
- Учебное заведение: МБОУ "Лицей N7", г. Химки Московская обл.
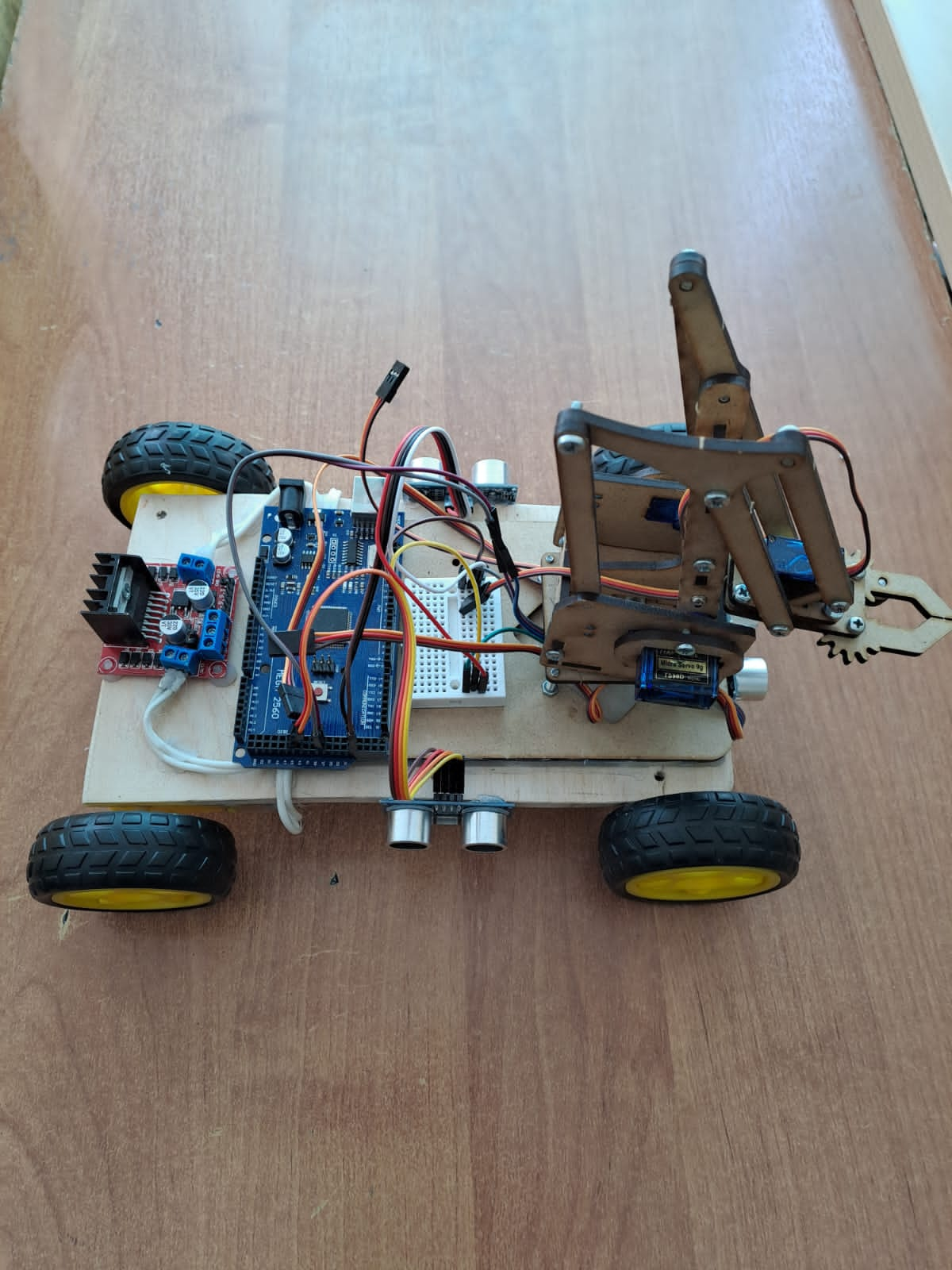
Мой проект является многофункциональным макетом робота-погрузчика для обучения азам работы с платформой Arduino.
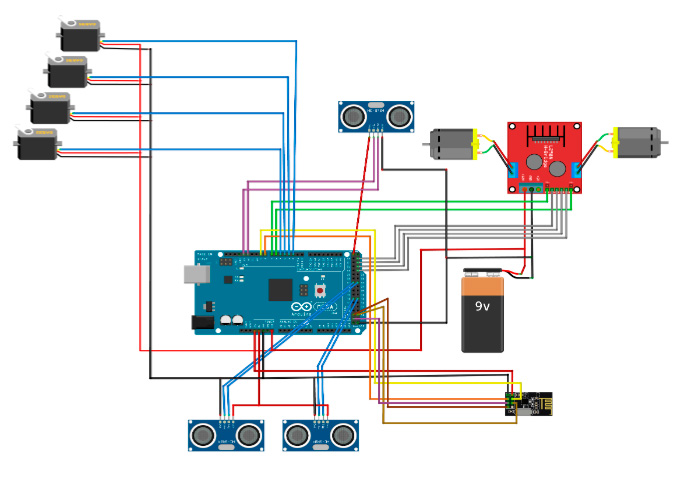
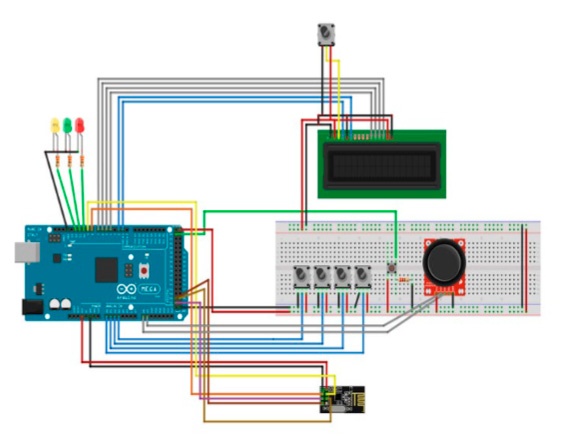
Для создания данного проекта я использовал платформу Arduino MEGA, драйвер моторов L298N, 2 мотор-редуктора, 2 li-ion аккумулятора формата 18650,батарейку типа крона, модуль джойстика, 4 потенциометра, 2 модуля NRF24L01, ЖК дисплей, 4 резистора на 330 ОМ, 3 светодиода разных цветов,кнопка,соединительные провода, тумблеры для линии питания,конденсаторы 0,1 мкф, 2 контейнера и 2 колеса для моторчиков.
Характеристики робота-манипулятора.
- Имея 4 потенциометра, роботизированная рука может учиться на движениям,которые задает оператор,с пульта, и повторять эти движения бесконечно.
- С целью лучшего контроля над роботом; режимы обучения, записи и воспроизведения можно визуализировать с помощью светодиодных ламп.
- Углы расположения осей могут отображаться на ЖК-мониторе.
- Колесами можно дистанционно управлять в плоскости XY.
- Робот имеет возможность получать данные о расстоянии от окружающих его объектов и избегать препятствий.
- Включение и выключение на контроллере и моделях автомобилей-роботов полезно для экономии заряда батарей.
В планах создать уникальное робототехническое устройство, которое облегчит жизнь людей и надеюсь решит какую-то глобальную проблему.