Роботизированный захват. 3D-моделирование в ПО Компас
- Автор(ы): Коняхин Иван
- Научный руководитель: Терехова Н.В., учитель инженерной графики
- Учебное заведение: ГБОУ "Школа 1245", г. Москва
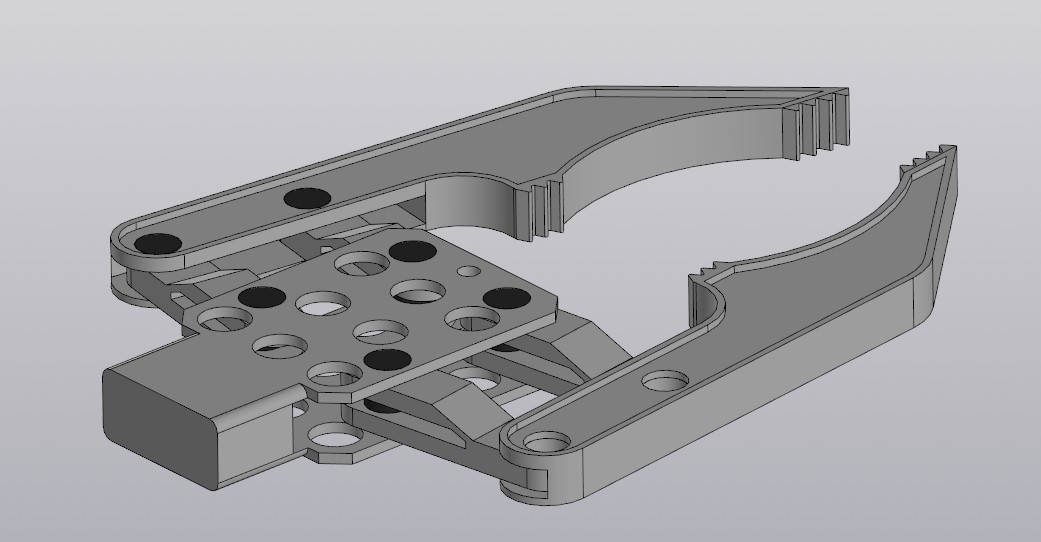
Я разработал 3D-модель роботизированного захвата для перемещения банок с консервированными продуктами в условиях гибкого автоматизированного участка производства.
Выбор этого проекта я сделал благодаря участию в дистанционном туре международного молодежного графического турнира, посвященного 20-летию Технологического института имени К.А.Тимирязева. Главным индустриальным партнером Турнира являлась кафедра процессов и аппаратов перерабатывающего производства Технологического института, а тема Турнира - «Пищевая инженерия».Объектом для данного захвата, по заданию турнира, должна быть жестяная консервная банка, диаметром 60-100мм. Исходя из этого, я разработал шарнирно-рычажный механизм и конструкцию захватывающих губок. 3D-модель захвата состоит из 13-ти деталей. Я рассмотрел всевозможные захваты, создал 3D-модель, сборочный чертеж, спецификацию.