Автономный робот для распределения и сбора тары при уборке урожая во фруктовых садах
- Автор(ы): Волчков Александр
- Научный руководитель: Иванова А.И., педагог "Робототехники"
- Учебное заведение: МАОУ "Гимназия г. Троицка", г. Троицк г. Москва
В работе рассмотрена следующая гипотеза: оценка возможности конструирования и программирования робота для распознавания контейнеров для сбора урожая фруктов и распределения их во фруктовом саду в зависимости от плодовых культур.
Целью работы является реализация роботизированного решения для сортировки предметов и размещения их в нужных позициях в условиях зонирования территории по плодовым культурам. Поставлена задача рассортировать предметы по цвету и размеру с последующим перемещением на заранее определенные позиции.
В процессе проектирования робота исследовались следующие составляющие: каркас и конструктивные элементы, электрика и электроника, мобильность, система управления предметами и алгоритмы действий робота.
- Исследовано несколько вариантов конструкции (каркаса) робота. Сделан вывод, что конструкция с двумя ведущими колёсами и шарнирной опорой заслужила максимальную оценку, так как модель получается относительно несложной, достаточно устойчивой и отлично маневрирующей.
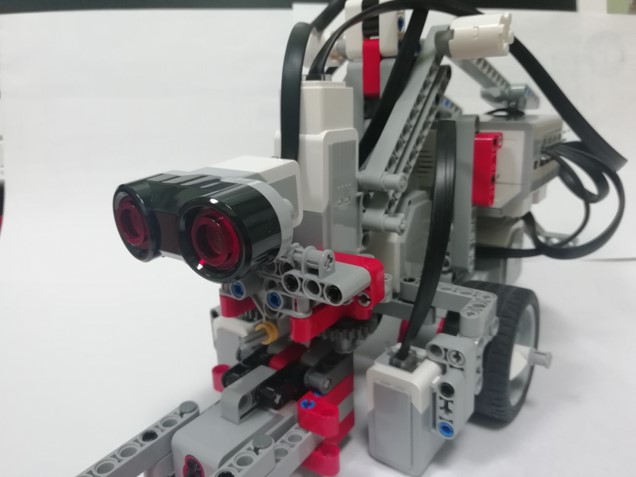
- Собрана конструкция, состоящая из рамы с двумя большими моторами, передающими вращение на ведущие колеса. Для приведения в действие захвата в конструкцию добавлен средний мотор, закрепленный спереди на продольной оси. Для перемещения объектов по высоте в конструкцию добавлен большой мотор, связанный с манипулятором механизмом типа «пантограф».
- Конструкция оснащена тремя датчиками цвета, два из которых отвечают за движение по линии и распознавание перекрестков, а третий датчик определяет цвет объекта. Для определения расстояния до объекта в режиме маневрирования в конструкцию добавлен ультразвуковой датчик.
- Выбран манипулятор в виде двух рук-захватов. Манипулятор оснащен опцией ограничения усилия зажима.
- Манипулятор оснащён лифтом, который обеспечивает подъём на заданную высоту.
- В ходе исследований рассматривались различные варианты алгоритмов действий робота. Получен следующий оптимальный алгоритм функционирования робота:
Сконструированный робототехнический комплекс продемонстрировал хорошую работоспособность. Незначительные ограничения могут быть устранены в следующих версиях.








