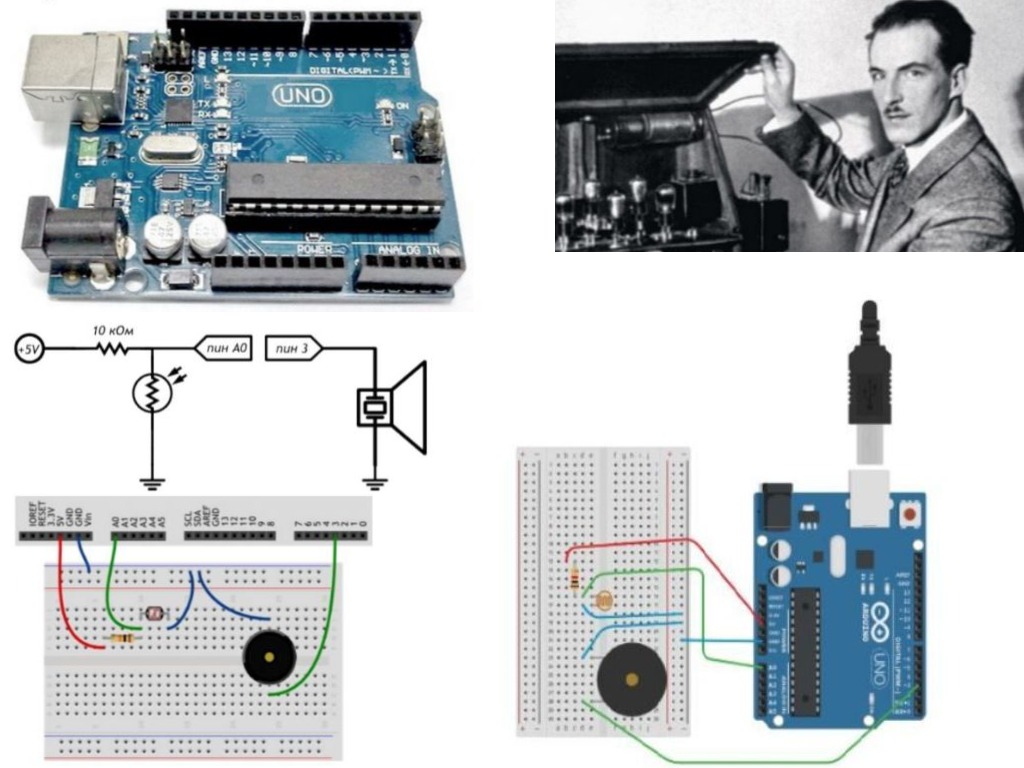
ПРОБЛЕМЫ ИЗГОТОВЛЕНИЯ И ДЕМОНСТРАЦИИ АКУСТИЧЕСКОЙ ЗОННОЙ ПЛАСТИНКИ
-
Описание проекта
В работе анализируется процесс изготовления акустической зонной пластинки, подбор средств для воспроизведения и приёма звука, рассматриваются проблемы демонстрации звуковых эффектов, связанных с демонстрацией акустической зонной пластинки.
Акустическую зонную пластинку для демонстрации на уроках можно создать достаточно простыми средствами. При этом самым сложным является процесс вырезания колец, который должен быть проведен с высокой точностью. В качестве источника и приёмника звука можно использовать смартфон с загруженными приложениями. Эффект фокусировки звука зонной пластинкой можно услышать ухом. Но для более детального рассмотрения эффектов следует использовать программу измерения уровня громкости звука.
РОБОТ-ЛЕСОРУБ НА БАЗЕ КОНСТРУКТОРА LEGO EV3 MINDSTORMS
-
Описание проекта
Робот-лесоруб – особая категория роботов из серии "производство". Робот движется автономно, а также может управляться дистанционно в ручном режиме. Робот оснащен механическим захватом - рукой, на лопастях которой имитируя круговые пилы размещаются шестеренки конструктора эвольвектор. В подвеске робота использован гусеничный ход, способный обеспечивать дополнительную устойчивость и повышенную проходимость. Робот может не только пилить деревья, но и перемещать спилы, погрузив их на специальную платформу в задней части конструкции, для которой использованы специальные пластины.
Робот состоит из 2-х больших сервомоторов, двух средних, инфракрасного датчика с маяком и датчика касания. Датчик касания используется в качестве кнопки запуска.
Робот-лесоруб получился очень функциональным в работе.
РОБОТ-ПАСТУХ НА БАЗЕ КОНСТРУКТОРА LEGO MINDSTORMS EV3
-
Описание проекта
Работа направлена на создание устройства с конкретной областью применения – закрытые вольеры с капитальным забором для выпаса небольшого стада. Робот-пастух, по сути, является заменой собаки-пастуха. Основные параметры: автономность, высокая взаимозаменяемость деталей, низкое электропотребление, два режима управления: ручной и автономный, простая программа, возможность широкого использования разными людьми.
Работа является экспериментальным образцом.
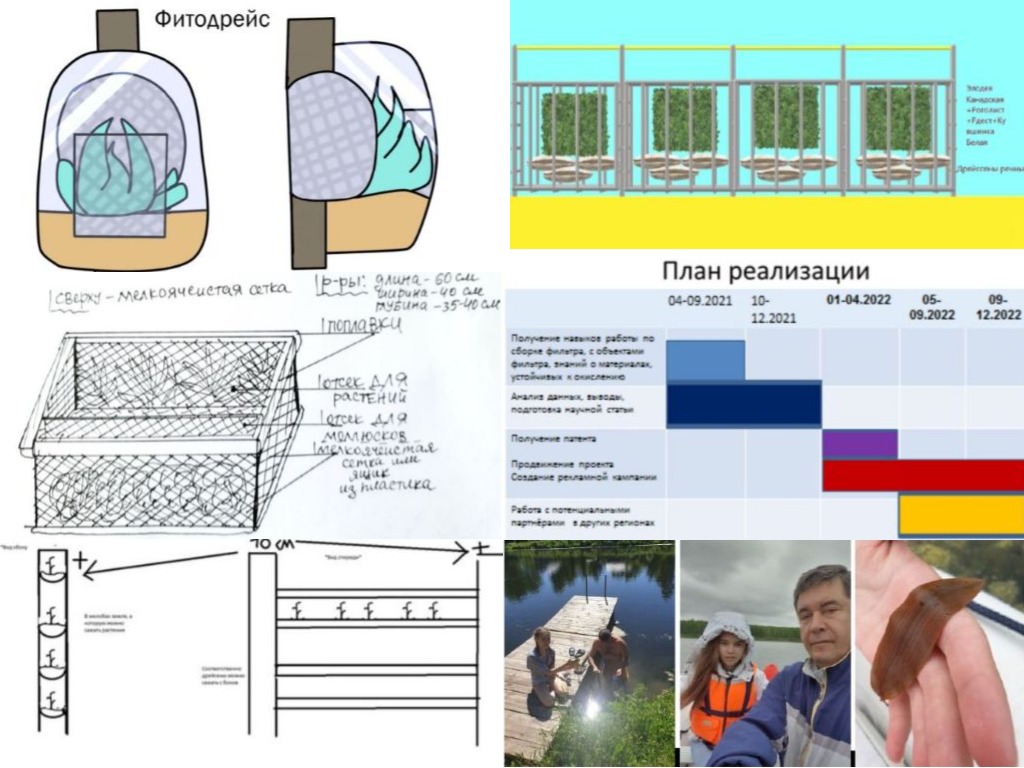
СИСТЕМА ВЫРАЩИВАНИЯ РАСТЕНИЙ В КОСМОСЕ НА БАЗЕ ОРХИДИУМА ДЛЯ ОРХИДЕИ VANDA
-
Описание проекта
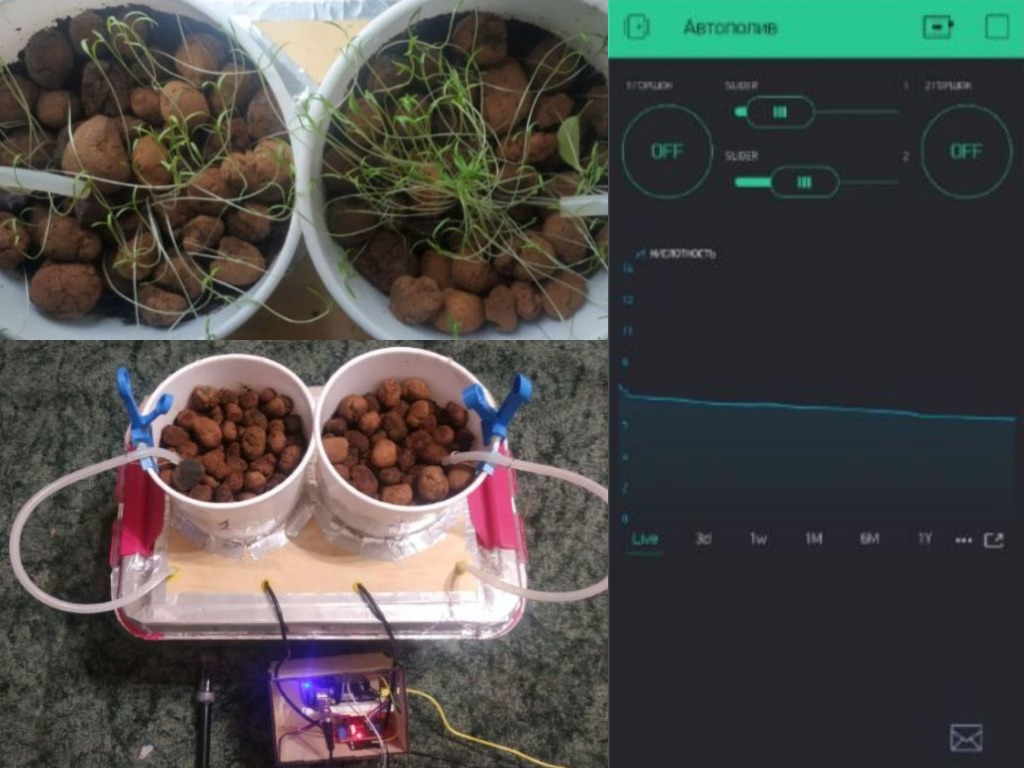
Вся система представляет собой две емкости, в каждую из которых помещается погружной мини-насос с силиконовой трубкой для подачи жидкости. В одной емкости располагается растение. Насосы подключены к плате Arduino uno через четырехканальные механические реле, так же подключается светодиодная фитолента и жидкокристаллический дисплей. Работа системы: на 1 сутки вода закачивается в колбу с растением, потом откачивается, запускается подсветка фитолентой и жидкокристаллический дисплей. На дисплее выводится надпись "день х после полива". Через 6 суток процесс повторяется, с заранее внесенным в воду удобрением.
АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПРИГОТОВЛЕНИЯ ПАСТЫ НА БАЗЕ УЧЕБНЫХ КОНСТРУКТОРОВ
-
Описание проекта
Автономный робот-кулинар способен повысить производительность труда на кухне, исключает ошибку в приготовлении пищи, поскольку всегда выполняет один и тот же алгоритм, направленный на нужный технологический цикл. Кроме того, робот исключает попадание в пищу инфекций.
МУЗЕЙНАЯ КОЛЛЕКЦИЯ РОБОТОВ
-
Описание проекта
В этом году я принимал участие во многих конкурсах по робототехнике и программированию и у меня возникла идея собрать все мои проекты в музейную коллекцию. В нее вошли проекты:
1. Робо-режиссер – проект создан для помощи всем любителям видеосъемки. Робо-режиссер может ездить по кругу и при этом камера снимает на 360 градусов. Благодаря датчику цвета и расстояния он понимает команды – едет на зеленый цвет вперед, а на желтый – назад.
2. Робо-повар – умное устройство в виде робота-помощника позволит сократить время на поиск нужного рецепта и повысит качество приготовления блюда. Робо-повар знает рецепт сырников и чая. Рука-миксер отлично перемешивает продукты.
3. Робо-грузчик – он выполняет две функции: определение груза по цветовым меткам и его последующую перевозку. Для сортировки ящиков и распознавание предметов по цветам есть датчик цвета и цветные карточки.
4. Симулятор космоса – незаменим в обучении космонавтов управлению ракетой, а также отработке профессиональных навыков работы в космосе, тренировке реакции.
5. 3D принтер – особенности конструкции: подвижный стол двигается линейно в двух измерениях – по осям X, Y, печатающая головка представляет собой 3D ручку, которая закреплена на штативе.
Организация музейной коллекции позволит накопить материал для дальнейшей работы и демонстрировать результаты всем тем, кто интересуется роботами.
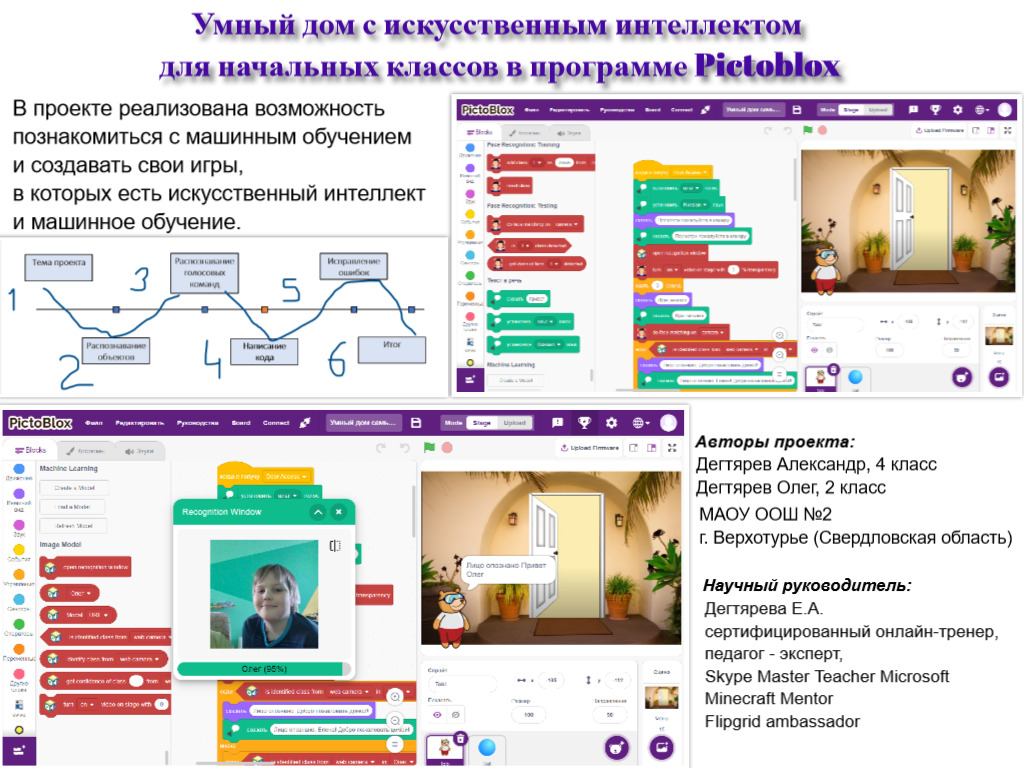
СОЗДАНИЕ ИНТЕРАКТИВНОЙ КНИГИ ПО ПРОИЗВЕДЕНИЯМ РУССКИХ АВТОРОВ В СРЕДЕ ПРОГРАММИРОВАНИЯ PICTOBLOX С ПРИМЕНЕНИЕМ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
-
Описание проекта
Интерактивные книги обладают практической ценностью. Они способны предоставлять информацию разнообразными способами. Интерактивный рассказ, как новое средство обучения, возможно использовать как дополнение к обычным занятиям.
Для создания интерактивного рассказа каждый учащийся из команды выбрал литературное произведение русского автора.
Бояров Александр учащийся 3 класса подготовил проект по произведению Г. Остера "Эхо. Котенок по имени Гав". С помощью меню можно перемещаться не только по тексту рассказа, но и поиграть в игру с котенком Гав, отгадать загадки, послушать песенку котенка Гав.
Бахарев Кирилл, учащийся 5 класса проект по произведению Натальи Ушкиной "Машины чемпионы". В проекте предусмотрена игра-гоночки. Управляется гоночная машина лего рулем. Лего руль Кирилл собрал из конструктора Lego Wedo 2.0. Используется среда Pictoblox, выполняется подключение конструктора Lego Wedo 2.0, также необходимо приложение Pictoblox Link для подключения смартхаба конструкции Лего руля. Выполнено машинное обучение на распознавание цветов. Таким образом при выборе гоночной машины по карточке можно поменять цвет гоночной машины.
Геряев Захар учащийся 3 класса проект по русской народной сказке «Каша из топора». В проекте создана анимация по сказке, лабиринт с подробными инструкциями.
Гамзов Павел учащийся 5 класса проект по басне И.А. Крылова "Ворона и лисица". В качестве элементов интерактивности используется кнопки, подготовлена викторина, а победитель викторины награждается виртуальной головкой сыра.
Горячев Глеб учащийся 4 класса, для создания интерактивной книги использовал стихотворения А.Барто "Апрель", "Полезная коза".
ИНТЕРАКТИВНАЯ АНИМАЦИЯ ПО ПРОИЗВЕДЕНИЯМ А. БАРТО В СРЕДЕ ПРОГРАММИРОВАНИЯ SCRATCH
-
Описание проекта
Делая первые шаги к "цифровому будущему", к своей будущей профессии программист, создал первую анимацию в среде программирования Scratch, на стихотворение "Апрель", "Полезная коза" Агнии Барто. Подробно и поэтапно рассказал историю создания, показал алгоритм и оптимальности кода спрайтов.
ИНТЕРАКТИВНАЯ КНИГА В СРЕДЕ ПРОГРАММИРОВАНИЯ PICTOBLOX С ПОДКЛЮЧЕНИЕМ LEGO РУЛЯ И ПРИМЕНЕНИЕМ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
-
Описание проекта
В проекте предусмотрена игра – гоночки. Управляется гоночная машина лего рулем. Лего руль Кирилл собрал из конструктора Lego Wedo 2.0. Используется среда Pictoblox, выполняется подключение конструктора Lego Wedo 2.0, также необходимо приложение Pictoblox Link для подключения смартхаба конструкции Лего руля. Выполнено машинное обучение на распознавание цветов. Таким образом при выборе гоночной машины по карточке можно поменять цвет гоночной машины.
ИНТЕРАКТИВНАЯ АНИМАЦИЯ ПО БАСНЕ И.А КРЫЛОВА "ВОРОНА И ЛИСИЦА" В СРЕДЕ ПРОГРАММИРОВАНИЯ SCRATCH
-
Описание проекта
В качестве элементов интерактивности используется кнопки, подготовлена викторина, а победитель викторины награждается виртуальной головкой сыра.
ИНТЕРАКТИВНАЯ АНИМАЦИЯ ПО РУССКОЙ НАРОДНОЙ СКАЗКЕ "КАША ИЗ ТОПОРА" В СРЕДЕ ПРОГРАММИРОВАНИЯ PICTOBLOX С ПРИМЕНЕНИЕМ ИСКУССТВЕННОГО ИНТЕЛЛЕКТА
-
Описание проекта
В проекте создана анимация по сказке, лабиринт с подробными инструкциями.
ИНТЕРАКТИВНАЯ АНИМАЦИЯ ПО РАССКАЗУ Г. ОСТЕРА «КОТЕНОК ПО ИМЕНИ ГАВ. ЭХО» В СРЕДЕ ПРОГРАММИРОВАНИЯ SCRATCH
-
Описание проекта
Делая первые шаги к "цифровому будущему", к своей будущей профессии программист, создал первую анимацию в среде программирования Scratch по рассказу Г. Остера «Котенок по имени Гав. Эхо». Подробно и поэтапно рассказал историю создания, показал алгоритм и оптимальности кода спрайтов.
РЕШЕНИЕ ПРОБЛЕМЫ УТИЛИЗАЦИИ КОСМИЧЕСКОГО МУСОРА
-
Описание проекта
Автор рассказывает об изучении проблемы образования космического мусора в околоземном пространстве и предлагает модель аппарата по сбору такого мусора построенного на базе конструктора LEGO WeDo 2.0
Использование околоземного пространства привело к появлению большого количества космического мусора на орбите планеты. Ученые подсчитали, что сейчас в космосе находится почти 128 млн кусков космического мусора размером более 1 мм и 34 тыс. частиц размером более 10 см. Накопление обломков спутников и частей ракет на орбите может стать проблемой для безопасности уже работающих аппаратов и вывода новых спутников.
В помощь нашим ученым я решил создать космического сборщика мусора "Валли", который напоминает по форме космический корабль, в голове которого стоит капитан. На нем установлен датчик движения, который срабатывает при виде пролетающих обломков и приводит в движение мотор, с помощью которого происходит захват мусора. Затем мусор отправляется в специальный контейнер для дальнейшей утилизации на Земле. Также я установил световой индикатор, который показывает состояние работы сборщика мусора.
МЕЧТЫ – ЭТО КРЫЛЬЯ БУДУЩЕГО!
-
Описание проекта
Предложена методика конструирования самолетов для детей начальной школы, с целью популяризации моделирования самолетов. Проведена практически-исследовательская работа, использован метод сопоставительного анализа информации. Изготовлены и собраны модели самолетов.
РАЗРАБОТКА РАКЕТЫ ДЛЯ ОПОВЕЩЕНИЯ В СЛУЧАЕ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ
-
Описание проекта
Работа основана на проектировании, конструировании, сборке, программировании и разработки ракеты для оповещений. Проведен сопоставительный анализ двигателей и запусков ракеты. Реализована методика проектирования двигателей и ракеты под определенные задачи.
УПРАВЛЕНИЕ И ПОДДЕРЖАНИЕ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ ЭЛЕКТРОСЕТИ 0.4 КВ С ПРИМЕНЕНИЕМ НЕЙРОСЕТИ
-
Описание проекта
Поддержание оптимальных параметров электросети 0,4 кВ с использованием нейросети позволит моментально считывать и отправлять данные о состоянии каждого участка сети. Это приведет к снижению потерь на передачу электроэнергии. В результате снизятся издержки при эксплуатации воздушных линий электропередач.
ИССЛЕДОВАНИЕ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ ТРУБ, СОЗДАННЫХ МЕТОДОМ НАМОТКИ АРМИРУЮЩИХ ВОЛОКОН, И РЕАЛИЗАЦИЯ ОПТИМАЛЬНОЙ СХЕМЫ НАМОТКИ ПРИ ИЗГОТОВЛЕНИИ КВАДРОКОПТЕРА
-
Описание проекта
Целью работы является исследование полимерных композиционных труб, созданных методом намотки армирующих волокон, и реализация оптимальной схемы намотки при изготовлении квадрокоптера.
В работе рассмотрены технологические особенности формирования композитных труб методом намотки. Экспериментальным путем показано влияние схемы намотки на прочность композиционной трубы.
ТИНГИД "РАЗНОЦВЕТНАЯ ДУША ГОРОДА ВОРОНЕЖ"
-
Описание проекта
Данный проект содержит "рассказ о своем мире" – месте, где мы живем в новом, еще никем не опробованном формате – с использованием возможностей языка программирования Python. Крутые, короткие, ориентированные на человека тексты, качественные звуки, стильный дизайн – вот сокровище, которое мы можем подарить миру.
Мы выбрали одно из достопримечательных мест нашего города Воронеж – Советскую площадь. Познакомим с историей ее появления и до наших времен. Расскажем, как она преобразовывалась вместе со своими историческими объектами, начиная с 1750 года. Одним словом, используя язык программирования Python, мы создали удивительную, интересную виртуальную экскурсию, которая позволит познакомить любителей путешествия с достопримечательностями нашего города.
ПЛАНИРОВКА ДАЧНОГО УЧАСТКА С ОСОБЕННОСТЯМИ РЕЛЬЕФА
-
Описание проекта
Основная идея проекта – сделать участок удобным для перемещения и пользования. Разместить дом и гараж. Добавить практичности в виде плодового сада и теплицы. Обустроить площадки для отдыха, проложить дорожки и провести все нужные коммуникации к дому.
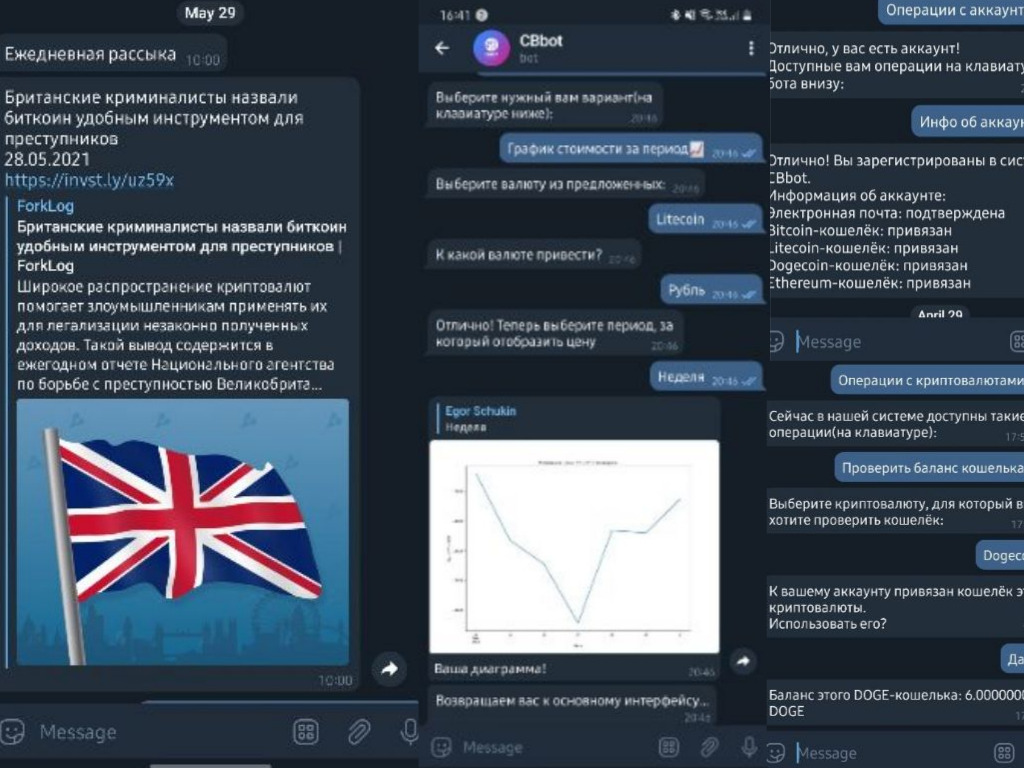
СОЗДАНИЕ TELEGRAM-БОТА НА PYTHON3 С ИСПОЛЬЗОВАНИЕМ БД MYSQL
-
Описание проекта
Результатом работы стал Telegram-бот, который способен удовлетворить потребности небольшой кофейни в интернет-магазине.
Процесс изучения и применения разных библиотек для Python оказался очень интересным и полезным.
В данный момент проекту требуется заказчик, чтобы бот стал применяться на практике.
Видео: https://youtu.be/8Ne0maNG8hE
ПОВЫШЕНИЕ КОМПОНЕНТООТДАЧИ ПРИ РАЗРАБОТКЕ ГАЗОКОНДЕНСАТНЫХ МЕСТОРОЖДЕНИЙ
-
Описание проекта
Для повышения компонентоотдачи нефтяных месторождений разработано и применяется много методов воздействия. В газовой промышленности России есть только одно месторождение, на котором применяется сайклинг-процесс для повышения добычи конденсата. Таким образом, в своей работе мы изучили теоретические вопросы и, используя особенности Астраханского газоконденсатного месторождения, изучили вопрос повышения компонентоотдачи.
УЧЕБНЫЙ СПЕКТРОСКОП ДЛЯ СРАВНИТЕЛЬНОГО АНАЛИЗА ИСТОЧНИКОВ ИСКУССТВЕННОГО ОСВЕЩЕНИЯ
-
Описание проекта
Разработанный стенд может быть использован для наблюдения и оценки спектра излучения различных источников, применяемых в исследованиях влияния спектрального состава света на различные процессы и явления. Так же стенд может быть применен в целях демонстрации соответствующих оптических явлений в ходе процесса изучения оптики. Кроме того при оснащении стенда дополнительными элементами (кюветами, линзами, поляризационными фильтрами и другими приспособлениями) могут проводиться различные исследования, например исследование спектров излучения и поглощения различных веществ, анализ оптической плотности, анализ флуоресцентных и люминесцентных веществ, анализ свойств поляризованного света.
СПОСОБЫ РЕШЕНИЯ КВАДРАТНЫХ УРАВНЕНИЙ
-
Описание проекта
Квадратные уравнения находят применения в различных областях. Умение быстро, рационально и правильно решать квадратные уравнения облегчает прохождение многих тем курса математики. В работе «Способы решения квадратных уравнений» систематизируются способы решения квадратных уравнений. Дается сравнительный анализ различных видов квадратных уравнений, входящих в курс математики. Составлены алгоритмы решения квадратных уравнений, которые представлены в виде блок-схемы и таблицы.
Выполненные исследования привели к созданию дидактического материала, состоящего из 200 квадратных уравнений десяти видов. Дидактический материал представлен в таблице, в каждом столбце которой содержится по двадцать уравнений одного вида. Помимо перечисленных уравнений в таблице имеются уравнения, в которых:
а) переменная обозначена латинской буквой, отличной от x;
б) уравнения, записанные не в стандартном виде;
в) уравнения, которые можно упростить, разделив левую и правую части на число, отличное от нуля.
Также в таблицах приведены решения каждого из 200 квадратных уравнений.
Ценность полученных результатов в новизне подхода к исследованию объекта - квадратных уравнений коэффициенты которых очень малы и вычисление по общей формуле затруднительно.
Для вычисления корней уравнения в этом случае предлагается более удобный метод, способ последовательного приближения. Рассмотрены примеры решения уравнений таким способом.
Дано численное решение квадратных уравнений. Разработана компьютерная программа для решения различных видов квадратных уравнений.
Программа написана на языке Visual Basic в среде Visual Basic for Applications (VBA). При этом найдены решения уравнения, в которых два корня, один корень, нет корней, коэффициенты а+b+с=0 и а-b+с=0, коэффициенты уравнения очень малы. Также получены корни уравнения на множестве комплексных чисел. Результаты программы подтверждены экспериментальными расчетами.
Работа "Способы решения квадратных уравнений" имеет теоретическое и практическое значение при изучении курса математики. Материалы проекта могут быть использованы на уроках и факультативах по математике и информатике.
НЯМ-НЯМ. АВТОМАТИЧЕСКАЯ WI-FI КОРМУШКА ДЛЯ ДОМАШНИХ ГРЫЗУНОВ И ПТИЦ
-
Описание проекта
Изобретение относится к устройству для кормления домашних животных, в частности к устройству для кормления домашних животных на основе Интернета вещей.
Кормушка предназначена для кормления именно мелких домашних грызунов (хомяков, песчанок, мышей) и птиц.
Мы заменили классический шнек на шнек, состоящий из щетинок, расположенных по спирали. Данное решение позволяет удерживать мелкий корм внутри желоба для подачи корма в тот момент, когда кормушка не работает.
Кормушка съемная, устанавливается на внешнюю сторону клетки. Наша кормушка безопасна для питомцев, исключен риск перегрызания деталей кормушки питомцем и обеспечена безопасность питомца от подвижных частей кормушки. Установка кормушки на внешнюю сторону клетки также исключает риск неограниченного доступа питомца к корму.
Прототип нашей кормушки не требует покупки клетки, а устанавливается на уже имеющуюся дома клетку, что является более удобным вариантом для потребителя.
Разработанный нами прототип кормушки имеет специальную подставку для установки радом с аквариумом, дюной, террариумом. (если нет возможности крепления за прутья).
Разработанный нами прототип кормушки «Ням-Ням» имеет закрытую, съемную емкость для корма. Емкость для корма представляет собой вкручивающуюся прозрачную пластиковую емкость. Расположение емкости для корма вне клетки обеспечивает легкость пополнения дозатора кормом. Прозрачность обеспечивает визуальный контроль количества корма в кормушке. Закрытость емкости для корма защищает корм от влаги, пыли, насекомых и т.д.
Наша кормушка работает бесшумно (использован шаговый двигатель 24byj48). Шум при работе кормушки очень важный параметр и учитывался нами при разработке нашего прототипа.
Управление удаленно, подключение к системе «умный дом».
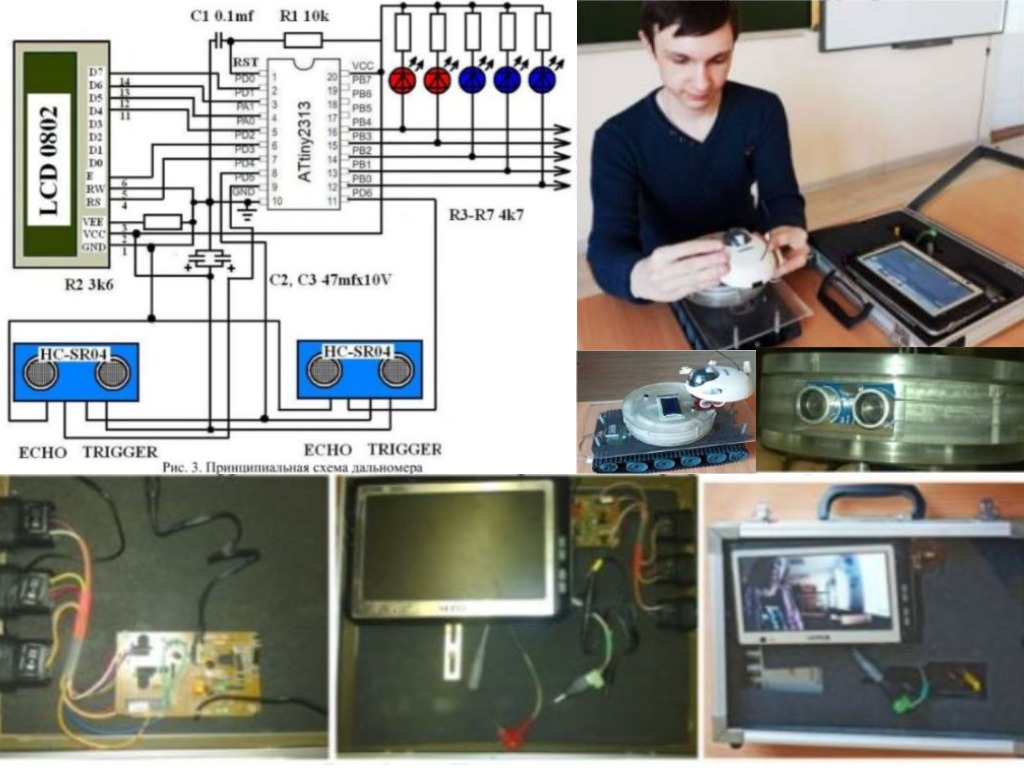
ВИБРАЦИОННАЯ БЕЛАЯ ТРОСТЬ С GPS НАВИГАЦИЕЙ ДЛЯ СЛЕПЫХ И СЛАБОВИДЯЩИХ
-
Описание проекта
В проекте разработан прототип "Умной трости" на основе вибрации, способной предупреждать носителя о преградах перед ним, а также преградах на уровне груди.
Создана модель устройства для предупреждения о препятствиях на базе платформы Arduino.
Составлена программа в среде Arduino IDE для системы.
В данной работе была изучены основные проблемы при передвижении, с которыми сталкиваются люди с проблемами зрения.
Рассмотрены решения, повышающие мобильность слепых и слабовидящих людей.
ИЗУЧЕНИЕ ПРИНЦИПОВ РАБОТЫ И ПРИМЕНЕНИЯ ЦЕНТРИФУГИ
-
Описание проекта
Разработанная модель похожа на Центрифугу 18 (ЦФ-18), которая находится в центре подготовки космонавтов имени Юрия Гагарина в Звездном городке.
Первоначально в 3D редакторе Lego Digital Designer (LDD) было спроектировано трехмерное представление модели. По 3D-модели из образовательного конструктора была построена реальная модель центрифуги, которая наглядно демонстрирует принципы ее работы. Центрифуга имеет две части – стойку и кабину, рассчитанную на двух человек. В конструкции модели используется один мотор, он приводит в движение кабину вокруг горизонтальной перекладины, на другом конце перекладины есть планетарная передача. Для раскручивания кабины вокруг своей оси собрана передача под прямым углом. Для управления тренажером написано две программы.
ТЕЛЕСКОПИЧЕСКИЙ МЕХАНИЗМ ДЛЯ КОСМИЧЕСКОЙ ТЕХНИКИ
-
Описание проекта
Замена человеческого труда машинным является визитной карточкой нашей эпохи. В последнее время всё большие обороты набирает тенденция использования и внедрения робототехнических устройств.
Цель работы: разработать устройство на основе телескопического механизма способное помочь в работе космонавтам в открытом космосе.
Одной из проблем космического оборудования является его масса и физические параметры, на борту космического корабля должен быть собран груз, который крайне необходим для обеспечения работы корабля и космонавтов.
Телескопическая выдвижная конструкция создана из конструктора Lego Mindstorms EV3. Она состоит из четырех секций: три секции выдвижные, четвертая прикреплена к основанию конструкции. Каждая секция одинакова и имеет с одной стороны направляющую, а с другой стороны элемент зацепления, за счет этого одна секция вставляется в другую и решается вопрос компактности размера всей конструкции и ее прочности. Устройство приводится в движение средним мотором, который вращает катушки для тросов. Тросы проложены по блокам, попарно соединяя секции. Для запуска и остановки программы управления устройством используется датчик касания.
Созданный механизм, компактен, не займет много места, легко раскладывается, прост в работе, возможна его дальнейшая модификация, например, можно использовать для развертывания солнечных батарей.
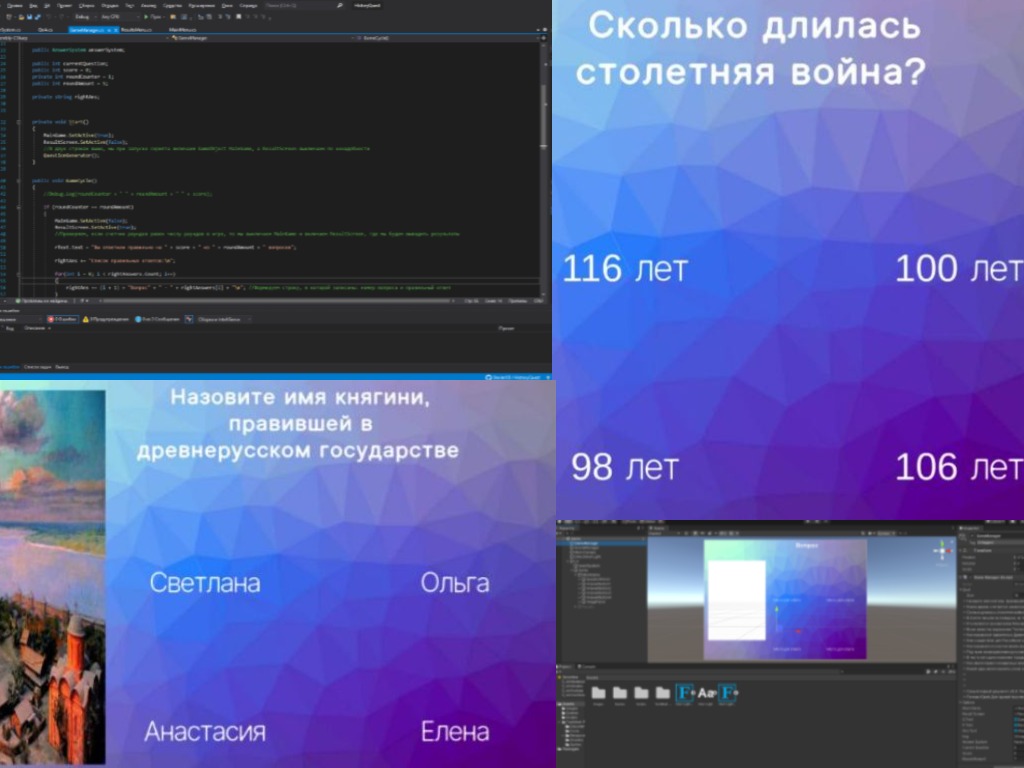
СОЗДАНИЕ ОБЪЁМНЫХ МОДЕЛЕЙ АТОМОВ И ТЕСТОВОЙ ИГРЫ ДЛЯ УЧАЩИХСЯ 9 КЛАССА С ИСПОЛЬЗОВАНИЕМ BLENDER И UNITY
-
Описание проекта
Созданы объёмные модели атомов щелочных металлов, чтобы показать как они устроены.
Создана игра для проверки знаний щелочных металлов. Тест представляет собой вопросы по щелочным металлам, сделанные в стиле игры, с 3 жизнями.
МЕТАВСЕЛЕННАЯ
-
Описание проекта
Виртуальные метавселенные представляют собой захватывающий и новый способ исследования и понимания нашего мира и его возможностей.
Однако, в виртуальных метавселенных есть и некоторые ограничения. Эти миры могут быть полностью зависимы от компьютерной технологии и технологии виртуальной реальности.
Кроме того, невозможно точно смоделировать все аспекты реального мира - такие условия, как гравитация и электромагнетизм, могут быть смоделированы только приблизительно.
В ходе проведения социального опроса https://www.youtube.com/watch?v=_po8sjDnV1s\ выяснилось, что большинство молодых людей пока в недостаточной мере имеют представление о развитии виртуальных технологиий в настоящее время.
Но мы видим, что цифровое пространство становится более сложным и интересным. И наблюдаем стадию перехода в новою реальность уже сейчас.
MUSICAL INSTRUMENTS SIMULATOR
-
Описание проекта
Система школьного образования испытывает потребность в качественном учебном VR-контенте. Разные темы образовательной программы можно эффективно изучать с помощью виртуальной реальности, однако, количество общедоступных учебных игр и тренажеров очень мало.
Создано приложение виртуальной реальности TRUBOFON SIMULATOR в среде разработки трехмерных приложений Unity на платформе виртуальной реальности Steam VR при помощи графического редактора Blender, с помощью которого можно обучиться играть на трубофоне.
Ссылка на проект: https://drive.google.com/drive/folders/1a9lUeg_0Fa2-uZHATPIV1qQd6wLcYokA?usp=share_link
ПАТРУЛЬНАЯ МАШИНА 3 В 1
-
Описание проекта
"Патрульный автомобиль 3 в 1 (ООН «АКУЛА»)" - это автомобиль, созданный для защиты граждан на новых территориях. ООН – расшифровывается как Отряд Особого Назначения, "АКУЛА" - название зависит от вида и образа беспилотного летательного аппарата, который входит в конструкцию автомобиля (в данном случае это акула). Остальные части являются пилотными-управляются полицейскими. Создан автомобиль из разного конструктора LEGO, в частности: LEGO BOOST, LEGO TEHNIC и LEGO City. Автомобиль оснащен большим (L) мотором, батарейным блоком, приёмником, который приводится в движение с помощью пульта управления.
ВТОРОЙ ЭТАП СОЗДАНИЯ УМНОГО КАБИНЕТА
-
Описание проекта
На плечи педагогов сваливается огромное количество работы. Благодаря умному кабинету учителя смогут больше времени посвящать обучению детей, ведь данная система будет сама следить за температурой и влажностью воздуха в классе, а также за количеством освещения. На втором этапе создания умного кабинета я занималась системой умных штор. Данная система, получая данные с устройства для сбора статистических данных, разработанного на первом этапе проекта, будет регулировать количество освещения в кабинете.
УСТРОЙСТВО ЗАЩИТЫ ДОКУМЕНТОВ SAFE TABLE
-
Описание проекта
В современном мире широко распространены различные системы охраны периметра, но, к сожалению, они не всегда эффективны при защите конкретного объекта. Однако наша усовершенствованная разработка – устройство Safe Table – спроектирована с учётом этих требований и имеет высокую эффективность в охране объекта, осуществляя проверку наличия предмета в зоне видимости встроенных датчиков.
Safe Table содержит компоненты автоматики и вычислительной техники, предназначенные для мониторинга наличия предмета с целью усложнить несанкционированное использование и перемещение.
ПРАКТИКА ПРИМЕНЕНИЯ КУЛАЧКОВОГО МЕХАНИЗМА В ИНТЕРАКТИВНОЙ ИГРУШКЕ "КОШКИ-МЫШКИ"
-
Описание проекта
Цель работы: на базе образовательного конструктора создать интерактивную игрушку для кошки.
Интерактивная игрушка для кошки изготовлена из конструктора Lego Mindstorms, картонной коробки и поролоновых шариков. Основу конструкции составляет кулачковый механизм. Кулачковым называется трехзвенный механизм, в своей основе имеющий фигурный диск – «кулачок», толкатель и ролик. В моей конструкции средний мотор приводит в движение зубчатую передачу под прямым углом. Зубчатая передача состоит из четырехзубых шестеренок. Кулачок установлен на ведомой оси.
Кулачок был изготовлен самостоятельно из двух зубчатых колес, соединенных изолентой. Конструкция толкателя представляет собой ось, на одном конце которой находится шкив, а на другом шарик.
Каркас устройства создан из балок и соединительных деталей конструктора. В картонной коробке проделаны отверстия для микроконтроллера, ультразвукового датчика и двух шариков.
Вывод: конструкция получилась прочная, все движущиеся части спрятаны в короб, игрушка нетоксична и безопасна для кошки. Кулачковая передача позволила решить проблему преобразования вращательного движения в линейное перемещение.
РАЗРАБОТКА АЛГОРИТМА РЕШЕНИЯ ЗАДАЧИ ДВИЖЕНИЯ РОБОТА НА ПОЛЕ ДЛЯ СОРЕВНОВАНИЯ "УСЛОЖНЕННЫЙ КЕГЕЛЬРИНГ"
-
Описание проекта
Подготовка к соревнованию по робототехнике – трудоемкий процесс. Соревнования "Усложненный кегельринг" проходили дистанционно, разрабатывать модель колесной платформы не пришлось, организаторы прислали схему сборки модели. По условиям соревнования на роботе были установлены два больших мотора, датчик цвета и ультразвуковой датчик. Именно эти датчики были нужны для решения задач.
Робот, не выходя за границы поля, за минимальное время должен вытолкнуть с поля шесть кеглей в следующей последовательности:
- самую близкорасположенную кеглю к центру поля;
- кеглю желтого цвета;
- все остальные кегли.
Проанализировав информацию о ранее прошедших соревнованиях, были сделаны выводы:
- Для управления моторами необходимо правильно настроить работу датчиков.
- Устранить ошибки, которые возникают при решении задачи.
- Рассмотреть разные подходы к алгоритму работы робота.
Был разработан алгоритм для робота, по которому было составлено три программы. В отборочном этапе соревнований робот набрал максимальные 100 баллов, выполнив все задания безупречно, но в финале не хватило поворота на 5 градусов, и линейный алгоритм дал сбой. В дальнейшем планируется создать универсальный алгоритм решения задачи усложненного кегельринга.
РОБОТИЗИРОВАННАЯ РУКА-БУДИЛЬНИК
-
Описание проекта
Созданная рука-будильник, основывается на тактильных ощущениях человека. Тактильные ощущения – ощущения прикосновения и давления. Немецкие ученые определили, что кожа и уши – единственные из органов чувств, которые работают аналогично, а именно: преобразуют механическую силу в электрические сигналы, отправляемые в мозг. Исследования показали, что многие люди, которые имеют проблему со слухом, одновременно испытывают трудности с осязанием. Однако далеко не все, кто теряет слух, одновременно утрачивает и осязание.
Рабочим инструментом послужил конструктор Lego Mindstorms EV3. В проекте были задействованы электронные устройства: три больших мотора, один средний, два датчика касания, микроконтроллер, соединительные шлейфы. Рука-манипулятор установлена на колёсной платформе. В алгоритме работы будильника предусмотрена настройка времени пробуждения. С помощью датчиков касания можно установить нужное время. Практическая значимость проекта заключается в том, что такой будильник поможет просыпаться по утрам людям с нарушением слуха.
НОВЫЕ ТЕНДЕНЦИИ В ОРГАНИЗАЦИИ ПАРКОВОГО ПРОСТРАНСТВА
-
Описание проекта
Изучив направления развития мест отдыха в городах, был разработан проект робота-информатора дракона (промобота) для парка. Он предназначен для интерактивного взаимодействия с людьми, информирования их по интересующим вопросам. Робота-дракона зовут Фуцанлун. Он установлен на подвижной, вращающейся платформе, умеет говорить и издавать звуки, работает он автономно, действуя на основе сигналов, поступающих с датчиков. По установленному времени платформа начинает вращаться, привлекая посетителей парка. Если посетитель подходит ближе, то ультразвуковой датчик фиксирует это, платформа перестает вращаться. Запускается второй мотор, дракон начинает подниматься и делать взмах крыльями. Робот задает вопросы посетителям и предлагает отсканировать QR-код с экрана, для ознакомления с дополнительной информацией о музее.
Использование таких роботов может помочь в развитии городской среды, сделав ее привлекательной, доступной и современной.
СРАВНИТЕЛЬНЫЙ АНАЛИЗ ВОЗМОЖНОСТЕЙ ОБРАЗОВАТЕЛЬНЫХ КОНСТРУКТОРОВ ПРИ РАЗРАБОТКЕ РОБОТОВ-ЧЕРТЕЖНИКОВ
-
Описание проекта
Задолго до того, как люди создали письменность, они научились рисовать окружающие их предметы. Сначала материалом служила земля, стены пещер, камни, на которых выцарапывались рисунки. Затем использовали бересту, кожу, папирус, пергамент, бумагу и другие материалы, на которые изображения наносились чернилами или тушью с помощью гусиного пера. Только в конце XVIII века для построения графических изображений стали применять карандаши.
Технологии продвинулись далеко вперёд и даже школьник может собрать себе роботизированное устройство для черчения. В интернете были найдены модели роботов-чертёжников, сделанных из различных образовательных конструкторов. Каждый проект содержал описание и программный код для работы устройства. Все данные были перенесены в таблицу. В качестве критериев оценки модели были выбраны: вид конструктора, сложность сборки, язык программирования, тип рисунка.
Вывод: выбор модели для создания робота нужно осуществлять от простого к сложному. Рекомендации: новичкам начинать с освоения конструктора LegoWedo 2.0 или LegoWedolight, тем кто уже знаком с этими наборами, продолжить работу с LEGO Mindstorms EV3. Для опытных робототехников следует совершенствовать свои знания и пробовать свои силы с конструктором Arduino uno.
ИССЛЕДОВАНИЕ ВОЗМОЖНОСТЕЙ ВЗАИМОДЕЙСТВИЯ ЧЕЛОВЕКА И РОБОТА С ПОМОЩЬЮ УСТРОЙСТВА ПХК "ШЕФ"
-
Описание проекта
Цель исследования: создать роботизированное устройство, которое станет незаменимым помощником повару на кухне и позволит экономить время в процессе приготовления блюд.
Еще несколько лет назад это было невозможным, но сейчас уже существуют роботы-повара, которые могут выполнять простые задачи на кухне и количество таких процессов постоянно увеличивается. Роботы пекут блинчики, подают мороженое, готовят горячие закуски, робот-шеф работает в паре с поваром-человеком и может приготовить блюдо из имеющихся заготовок.
К устройству ПХК «Шеф» были сформулированы требования и описан его функционал. Взаимодействия разработанного устройства и человека во время приготовления пищи: когда повару требуется украсить кексы, торт или другую выпечку, например, сахарной пудрой, то робот помогает ему. Повар устанавливает готовое изделие в рабочую зону и активирует программу, используя ультразвуковой датчик, далее порция продукта высыпается в сито. Через две секунды включается механизм вибрации, и сахарная пудра посыпает кекс.
Практическая значимость проекта заключается в том, что устройство сделает процесс приготовления еды быстрым, часть работы будет выполнять робот совместно с человеком.
ОХРАННЫЙ КОМПЛЕКС "ТРЕЗОР"
-
Описание проекта
Ежегодно зарегистрированных случаев кражи и проникновения на частные участки более тысячи. Летние дачи, загородные дома, производственные территории необходимо охранять круглый год. Для охраны территорий было решено спроектировать охранный комплекс «Трезор». Наличие охранного комплекса исключит риск проникновения нежелательных лиц на участок с целью воровства или порчи имущества. Комплекс автоматизирован и может работать без участия физических лиц (охраны).
Для выполнения поставленной задачи был спроектирован забор-трансформер и средство обнаружения. Они работают сообща. Принцип действия: как только датчики обнаруживают нарушителя, на монитор дежурного подается сигнал, одновременно с этим забор изменяется в размерах, выдвигая дополнительную секцию. Тем самым появляется время для приезда работников службы охраны.
ИССЛЕДОВАТЕЛЬ МАРСА
-
Описание проекта
Для роботов-исследователей самой важной характеристикой является проходимость. Такой робот должен уметь преодолевать любые встречающиеся на его пути преграды. При проектировании платформ следует изучить состав поверхности, где предполагается использовать робота.
Цель работы: создать колесную платформу с независимой подвеской, способную преодолевать неоднородную поверхность.
Изучив состав поверхности Марса, и рассмотрев существующие модели роботов-исследователей, была разработана восьмиколесная платформа с независимой подвеской. Такой привод позволяет повысить проходимость и устойчивость машины. Она легко преодолевает препятствия. Исследователь Марса приводится в движение с использованием червячной передачи, что усиливает тягу. Платформа состоит из деталей конструктора LegoWedo, на платформе установлены датчик расстояния, лебедка, манипулятор, кабина пилота с приборной панелью, грузовой отсек.
ТЕРМИКОША - ШКОЛЬНЫЙ РОБОТ-МЕДИК
-
Описание проекта
Мы поставили себе цель – создать робота-помощника, который будет бесконтактно измерять температуру, выдавая заряд положительных эмоций и поднимая всем настроение. На базе НПО "РД Групп" (г.Санкт-Петербург) мы поучаствовали в создании собственного Термометрикона - прибора, который может дистанционно измерять температуру тела. Мы создали аппаратный комплекс, соединив Термометрикон, микрокомпьютер Raspberry Pi, монитор и аудиоколонку. Мы нарисовали эскизы эмоций, записали голосовые сообщения и с помощью программы на языке Python научили нашего робота, которого мы назвали Термикошей, разговаривать и улыбаться. Теперь наш школьный робот-медик живет и работает в нашем классе, помогая всем ученикам и учителям оставаться здоровыми и жизнерадостными.
УСОВЕРШЕНСТВОВАНИЕ ПРОЦЕССА КУЧНОГО ВЫЩЕЛАЧИВАНИЯ В УСЛОВИЯХ КРАЙНЕГО СЕВЕРА
-
Описание проекта
Низкие температурные показатели в условия крайнего севера не позволяют осуществлять процесс кучного выщелачивания круглогодично, а также из-за замерзания раствора внутри кучи добыча золота происходит не в полном объёме.
Создание цифровой модели позволит исследовать экономичность новых технологий с последующим внедрением на самом предприятии.
Проект создания огромной промышленной конструкции, сохраняющей тепло, и специальных установок, создающих ультразвуковое влияние на руду и цианистый раствор при кучном выщелачивании, с целью устранить проблему замерзания вещества и образования ледяных застоев в руде и в последующем ускорения процесса добычи золота при цианировании руды.
Сайт проекта: https://polyusgemini.netlify.app
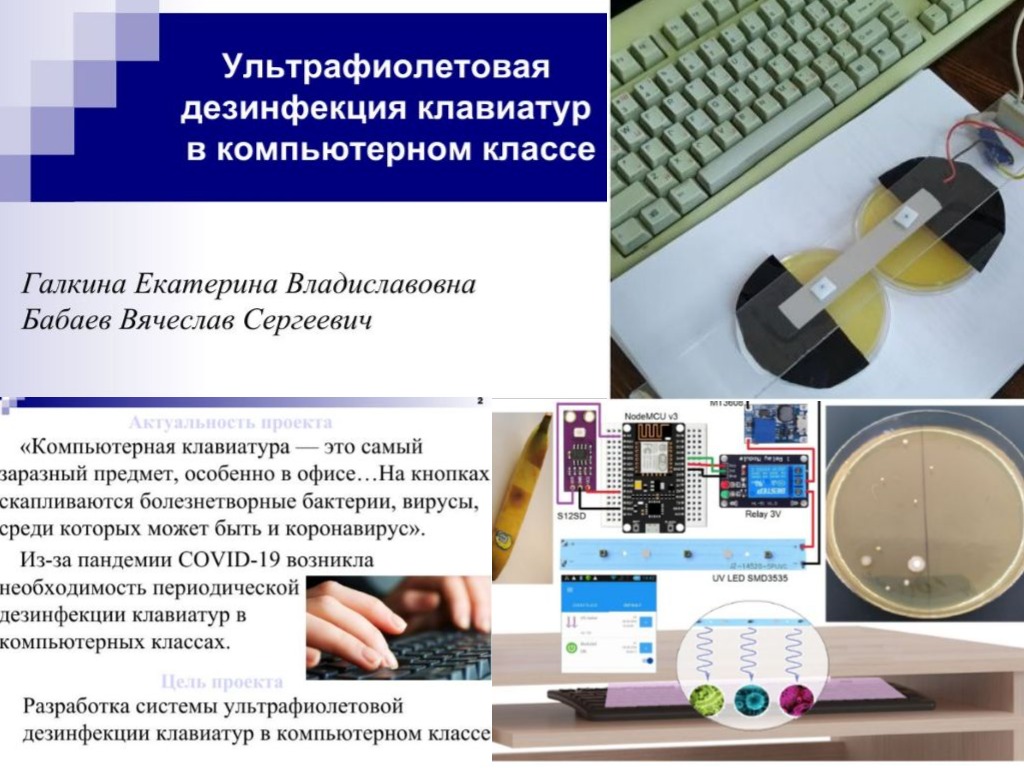
УСТРОЙСТВО ОЧИСТКИ И ДЕЗИНФЕКЦИИ ОБУВИ
-
Описание проекта
Устройство включается автоматически, как только человек ступает на поверхность решетки. Устройство очищает оьувь водой под давлением далее щётки дополнительно очищают и осушают обувь. Помимо этого используются ультрафиолетовые светодиоды для дезинфекции. Таким образом обувь проходит полный этап гигиенической очистки. После очистки обуви вода отправляется в устройство фильтрации воды и проходит сквозь фильтры для очистки.
Устройство можно использовать в учреждениях общего пользования для устранения загрязнения и повышения бактериальной безопасности.
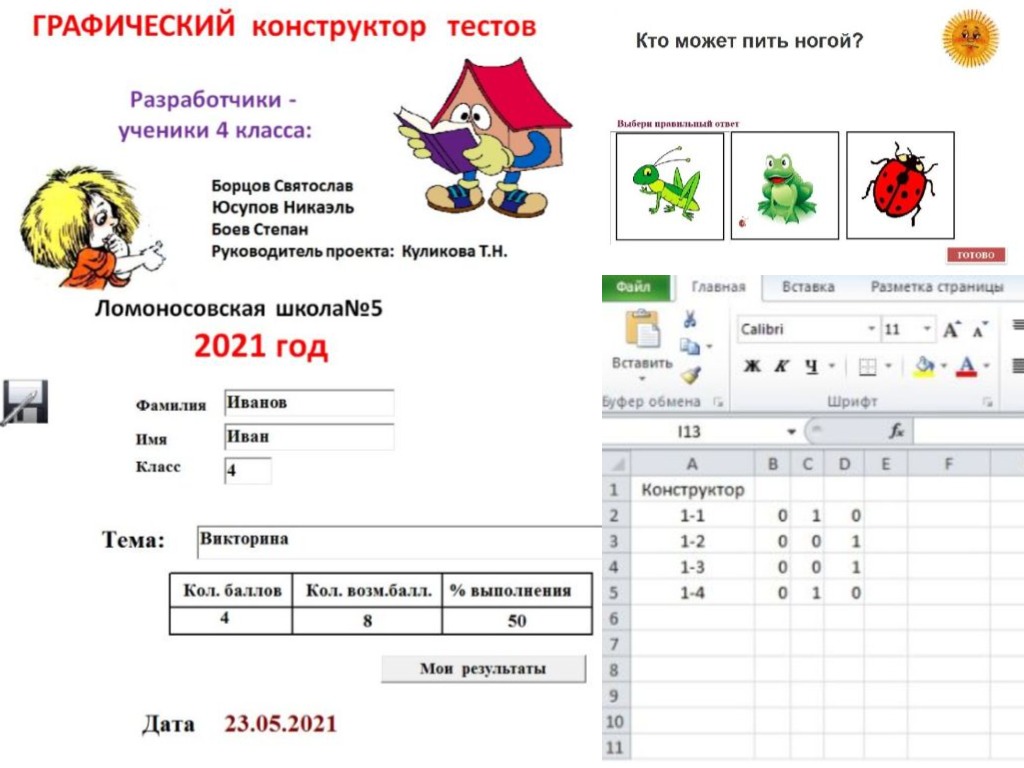
ЗАЧЕМ ИЗУЧАТЬ ПРОГРАММИРОВАНИЕ?
-
Описание проекта
Сейчас многие подростки не просто играют, но и сами создают компьютерные игры.
Игры с пользой – это еще лучше!
Например, игра, в которой, проходя путь, игрок проверяет знания по учебным предметам.
Играй! Дерзай! Твори! Создавай!
РАЗВИТИЕ АНАЛИТИЧЕСКОГО МЫШЛЕНИЯ И ОСНОВ КОНСТРУИРОВАНИЯ, С ИСПОЛЬЗОВАНИЕМ ПРОГРАММИРУЕМЫХ 3D МОДЕЛЕЙ
-
Описание проекта
В эпоху цифрового развития детям интересно не только собирать из деталей конструкторов модели, но и программировать их, чтобы они двигались и выполняли какие-то действия. Каждый ребенок мечтает собрать собственного робота. Но не всегда удается воплотить задумку в жизнь, т.к. в наборах конструкторов ограничено количество деталей.
На этот случай есть программы 3D моделирования, которые созданы специально для детей. В LDD была создана трехмерная модель необычного колеса обозрения. Этот аттракцион относятся к индустрии развлечений, содержит элементы, несущие пассажирские места, радиальные элементы, привод и систему управления. В конструкции модели используется один большой мотор, который приводит в движение с двух сторон расположенные радиальные элементы. Особенностью конструкции является расположение с двух сторон кабинок, что позволит с комфортом покатать больше людей. Всего установлено восемь кабинок, с каждой стороны по четыре. В одной кабинке может находиться два человека. Система управления включает в себя блок контроллера и датчик касания. В LDD использовались инструменты: копирования деталей, поворот на градусы для стыковки зубчатых колес.
СОЗДАНИЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В БЫТОВЫХ УСЛОВИЯХ
-
Описание проекта
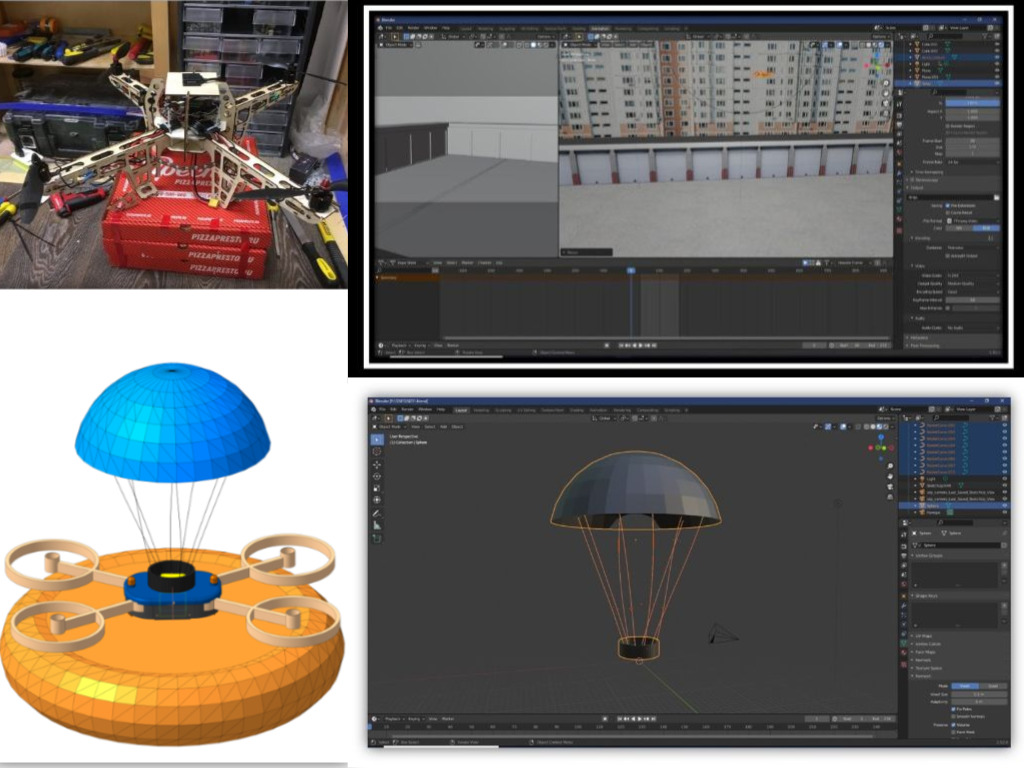
Моделью моего проекта станет легкий коптер весом до 1 кг на базе универсальной четырёхлучевой рамы, широко используемой во всех сферах общества.
Управление полётом:
- подъём – увеличение оборотов на всех винтах;
- опускание – уменьшение оборотов на всех винтах;
- движение в сторону - увеличение оборотов одной половины винтов и уменьшение оборотов другой половины винтов;
поворот - увеличение оборотов у винтов с вращением по часовой стрелке и уменьшение оборотов у винтов с вращением против часовой стрелке.
СОМ – САМОХОДНЫЙ ОЧИСТИТЕЛЬ АКВАРИУМОВ
-
Описание проекта
Очиститель Мойщик аквариумов.
- Умеет самостоятельно перемещаться
- Поднимать и отпускать губку
- Скребок можно регулировать по глубине
- Реагирует на голосовую команду: «СТОП!
ПОДЕЛКИ СВОИМИ РУКАМИ НА СТАНКЕ PLAY MAKE!
-
Описание проекта
С помощью станка play make мы смогли сделать поделки своими руками.
Станок play make безопасен для детей.
ИГРА-ТРЕНАЖЁР "СКАНМАТИК" НА PYTHON. ОБРАЗОВАТЕЛЬНЫЙ ПРОЕКТ ДЛЯ ОБУЧЕНИЯ ДЕТЕЙ МАТЕМАТИКЕ
-
Описание проекта
Игра-тренажёр "СканМатик" предоставляет возможность школьникам младшего возраста тренироваться в решении математических примеров в игровой форме.
Игра-тренажёр "СканМатик" представляет собой игровое программное обеспечение, выполненное по принципу логических головоломок «Японские кроссворды» или "Нонограммы", где необходимо найти зашифрованное изображение с помощью цифр.
Правилами игры предусмотрено нахождение нужных цифр путём решения математических примеров. Разработка поможет учащимся тренировать математический счёт в игровой форме. Проект "СканМатик" предназначен для детей младшего школьного возраста, но и имеет потенциал использования для учеников средней школы.
Код в открытом доступе размещён на сайте GitHub: https://github.com/Fox-Bella/nonogramms
ЛИНГВИСТИЧЕСКИЙ ТРЕНАЖЁР "KLEI"
-
Описание проекта
Тренажёр «KLEI» – компьютерная программа, позволяющая в игровой форме изучать новые термины или словосочетания.
В процессе используется «угадывание» необходимых символов по принципу кроссворда, когда некоторые буквы закрыты, а некоторые – открыты. Догадаться о содержимом можно по смыслу.
К тренажёру можно подключать различные словари формата JSON;
собирается подробная статистика действий пользователя.
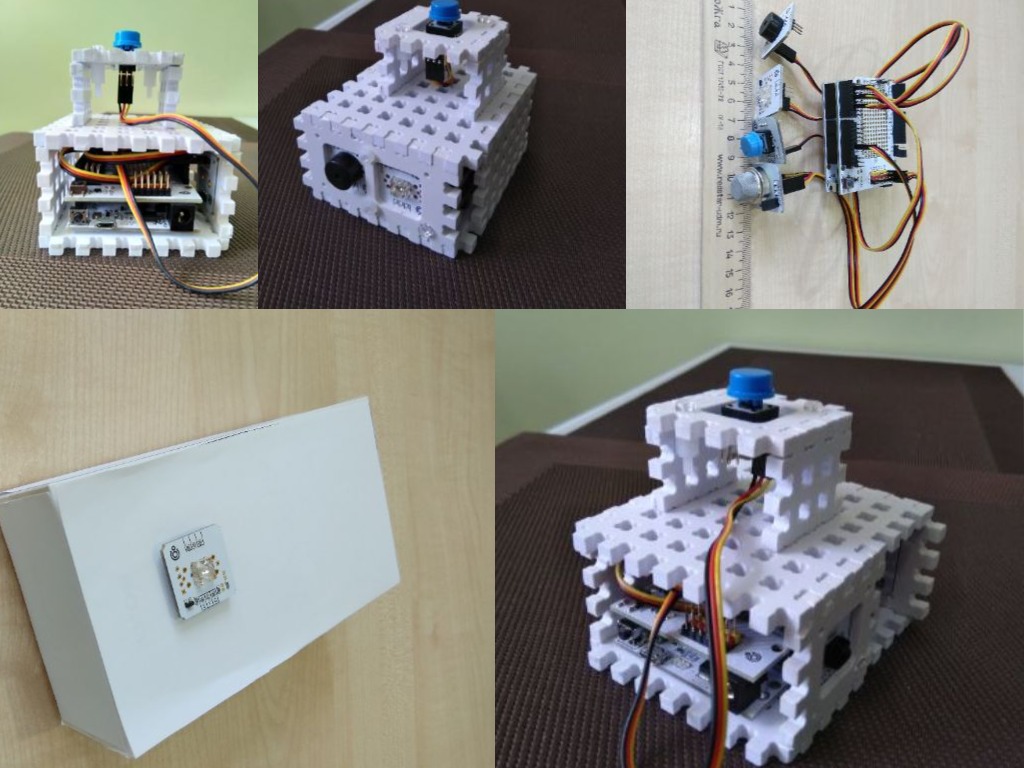
СИСТЕМА ТЕХНИЧЕСКОЙ ЗАЩИТЫ НА ARDUINO
-
Описание проекта
В моем проекте я разработал прототип системы технической защиты на микроконтроллере Arduino. Показал возможности применения этого микроконтроллера.
МЕХАНИЗМ ПОСЛЕДОВАТЕЛЬНОГО СОЕДИНЕНИЯ КУЛАЧКОВЫХ ШАГАЮЩИХ ОПОР
-
Описание проекта
Первые авторские работы были связаны с кулачковыми шагающими механизмами. В старинном журнале «Моделист-конструктор», номер которого установить не удалось, была обнаружена схема механизма-параллелограмма, который позволяет установить последовательность таких опор фактически на один механизм П.Л.Чебышева. Проведены первые опыты, собран механизм, испытана новая платформа для машины-гусеницы.
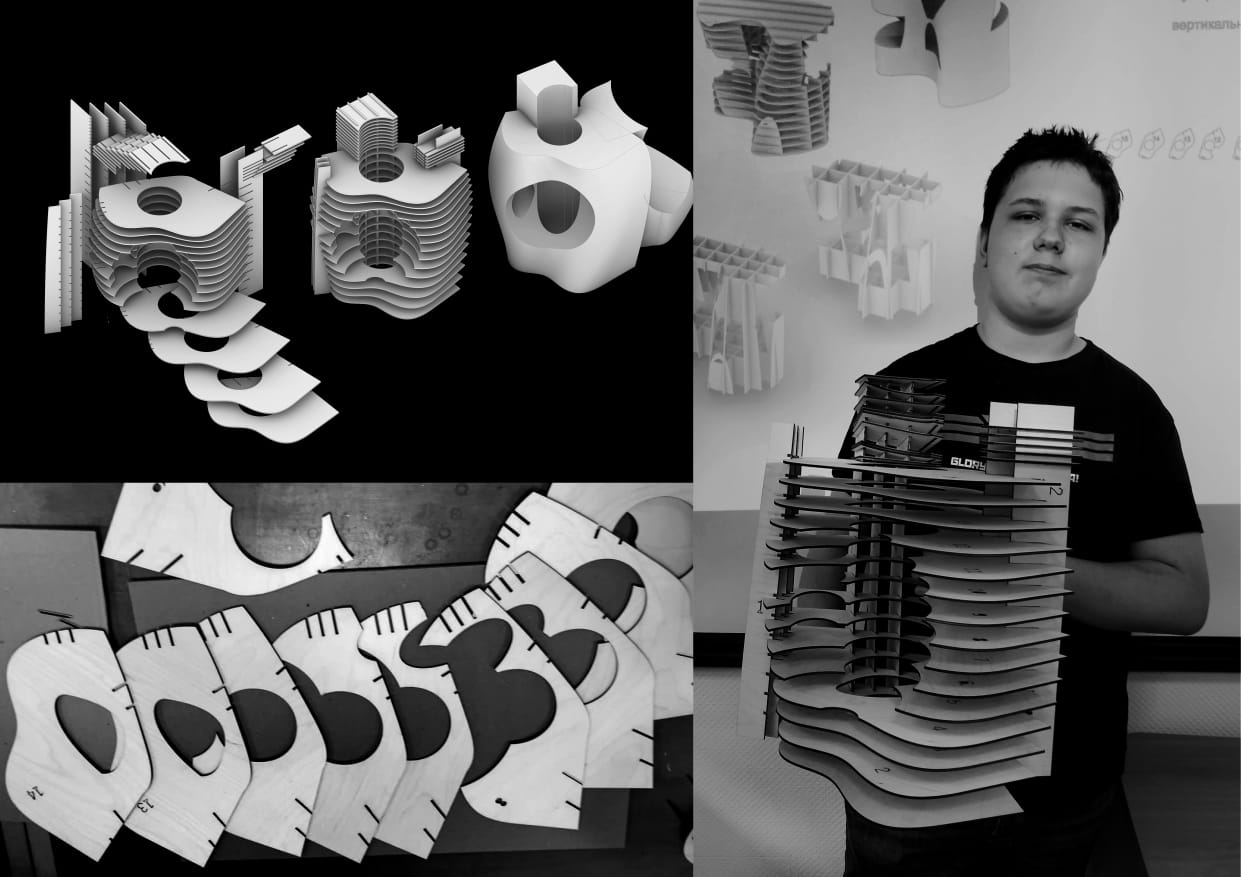
ОТ УСТОЙЧИВОЙ АРКИ К УСТОЙЧИВОМУ КУПОЛУ
-
Описание проекта
В работе продолжается исследование устойчивых строительных сборок. Именно сборок, а не сварных конструкций или комплексов с множеством креплений деталей различными способами: сварка, заклёпки, винты и т.д. В устойчивой строительной сборке детали укладываются одна на другую и лежат под действием только вертикальных сил тяжести и вертикальных реакций опор. Такая сборка применена, например, в Египетских пирамидах.
КОСМИЧЕСКИЙ АППАРАТ ИЗМЕНЯЕМОЙ ФОРМЫ ДЛЯ ГРАВИТАЦИОННОЙ СТАБИЛИЗАЦИИ
-
Описание проекта
Исследование началось с обсуждения простейшего опыта. Деревянная рейка была привязана к верёвке. Потом верёвка была раскручена. Цель такого простейшего эксперимента заключалась в выяснении вопроса о положении рейки во время вращения. Оказалось, что неподвижная рейка висит вертикально, но при раскрутке занимает горизонтальное положение. Вращение может происходить только относительно центра масс. Значит, таким способом можно найти эту точку экспериментально, а потом применить результат для космических аппаратов.
ОПОРНЫЕ КАТКИ РЁЛО ДЛЯ ПЕРЕМЕЩЕНИЯ ТЯЖЁЛЫХ ГРУЗОВ
-
Описание проекта
Работа относится к области тяжёлого машиностроения: металлургии, прокатных станов, транспортных платформ, горных работ – везде, где требуется перемещать тяжёлые грузы. После анализа известных устройств и литературы появилось предложение усовершенствовать процесс перемещения тяжёлых грузов. Сечение опорных роликов надо сделать не круглым, а в виде треугольника Рёло – кривой постоянной ширины, чтобы сохранить поступательное движение. Преимущество связано с безопасностью работ с тяжестями.
МАГНЕТРОННЫЙ СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОНАМИ ДЛЯ ЗАЩИТЫ КОСМИЧЕСКИХ АППАРАТОВ
-
Описание проекта
Магнетрон – это электронно-вакуумная лампа, в которой управление током происходит с помощью магнитного поля. Цель работы заключается в оценке возможностей применения магнетронного управления. Дополнительно решается задача лабораторного обеспечения учебного процесса при изучении электродинамики. Созданы лабораторные установки с электромагнитами вокруг радиоламп. Показаны новые возможности управления приборами.
НОВЫЕ МОДЕЛИ МАТЕРИАЛОВ-АУКСЕТИКОВ
-
Описание проекта
В настоящее время необходимость изучения материалов-ауксетиков связана с созданием принципиально новой продукции, например, новых заклёпок. Ауксетиками называют материалы с отрицательным коэффициентом Пуассона. При растяжении обычного материала в продольном направлении, происходит сжатие образца в поперечном направлении, но для материала-ауксетика наблюдается противоположное явление. Цель исследования заключается в создании трёхмерной призматической структуры ауксетика.
ОРБИТАЛЬНЫЙ МАНЁВР РАЗРЫВОМ ВРАЩАЮЩЕГОСЯ СТЕРЖНЯ
-
Описание проекта
Цель работы заключается в доказательстве возможности выполнения двухимпульсного орбитального манёвра вращающимся космическим аппаратом стержневой формы. Для получения первого импульса вращающийся аппарат стержневой формы разрывается, одна часть получает разгонный импульс, другая затормаживается, например, для входа в атмосферу. Затем первая часть стержня, тоже вращающаяся, разрывается второй раз. Доказана возможность совершения манёвра Гомана.
ОТ АКВАРИУМА К КОСМИЧЕСКИМ АППАРАТАМ
-
Описание проекта
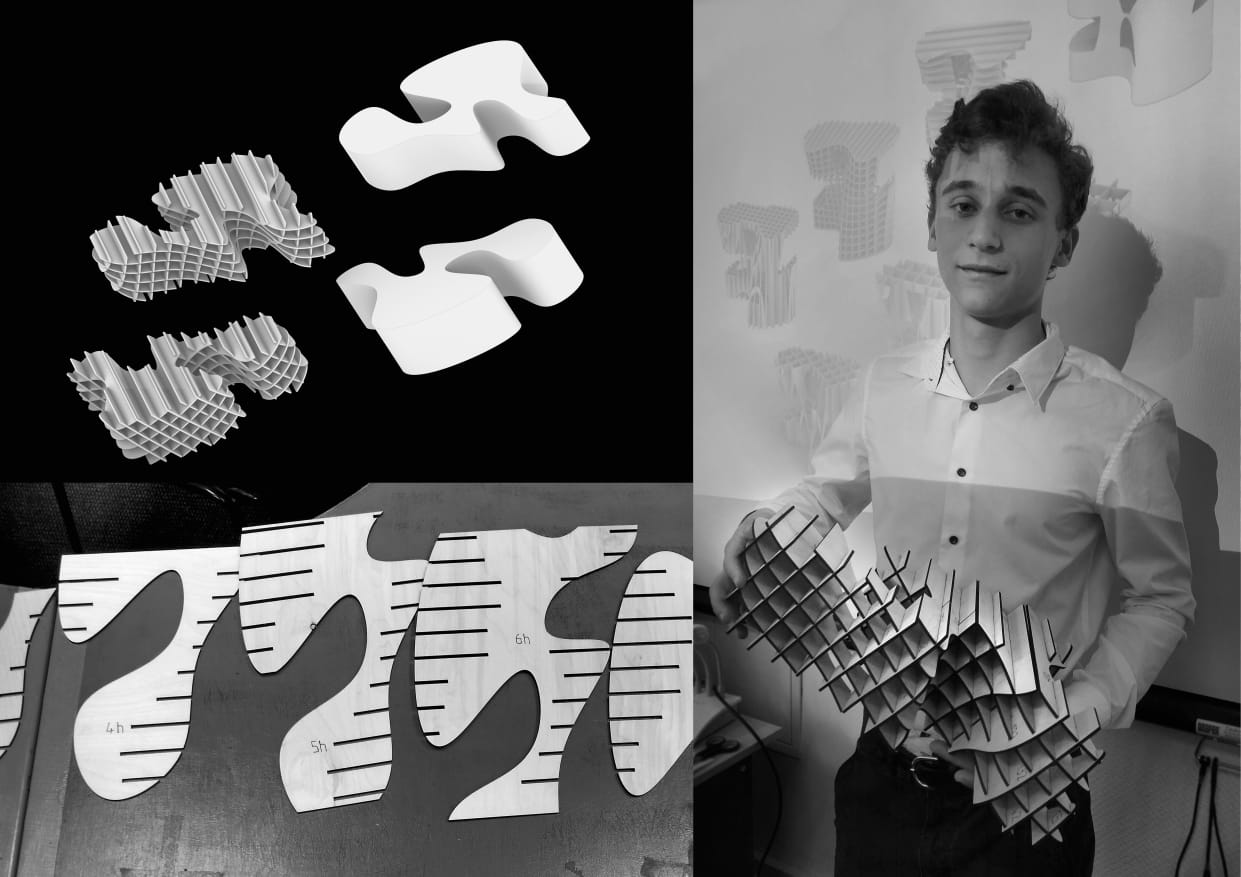
Идея работы появилась в самом начале обучения в ВУЗе. В первом семестре в курсе математического анализа студенты продолжают изучать применение производной для решения оптимизационных задач, но теперь намного более подробнее, по сравнению с школьной программой. Внимание привлёк сферический аквариум для разведения рыбок. Верх стеклянной сферы срезан. Является ли оптимальным этот срез? При исследовании этого вопроса появилось множество предложений рациональных форм космических аппаратов.
РАЗРАБОТКА СИСТЕМЫ ЗАХВАТА ДВИЖЕНИЙ И ИХ ВИЗУАЛИЗАЦИИ В РЕАЛЬНОМ ВРЕМЕНИ
-
Описание проекта
Итогом проделанной работы стала система, позволяющая захватывать и выводить на экран движения человека в реальном времени и уникальное графическое ядро, оптимизированное под современные GPU. В процессе реализации авторами был получен ценный опыт использования нейронных сетей, низкоуровневых компонент программного обеспечения и работы в команде.
ТЕЛЕГРАММ-БОТ ДЛЯ ИЗУЧЕНИЯ АНГЛИЙСКИХ СЛОВ
-
Описание проекта
Для 40% пользователей Telegram английском не является родным языком.
В качестве проекта был создан Telegram чат-бот для обогащения и укрепления словарного запаса пользователя.
Бот был преимущественно реализован с помощью языка программирования Python и библиотеки aiogram.
Бот - @nikitaproject_bot
ВОКРУГ АРКТИКИ ЗА 7 ДНЕЙ
-
Описание проекта
Проект создан с целью исследования Арктики и части Северного морского пути. Создан макет и визуальное сопровождение в виде интерактивной карты Арктики на языке программирования Scratch, чтобы познакомить других детей и разобраться самому в особенностях данного региона.
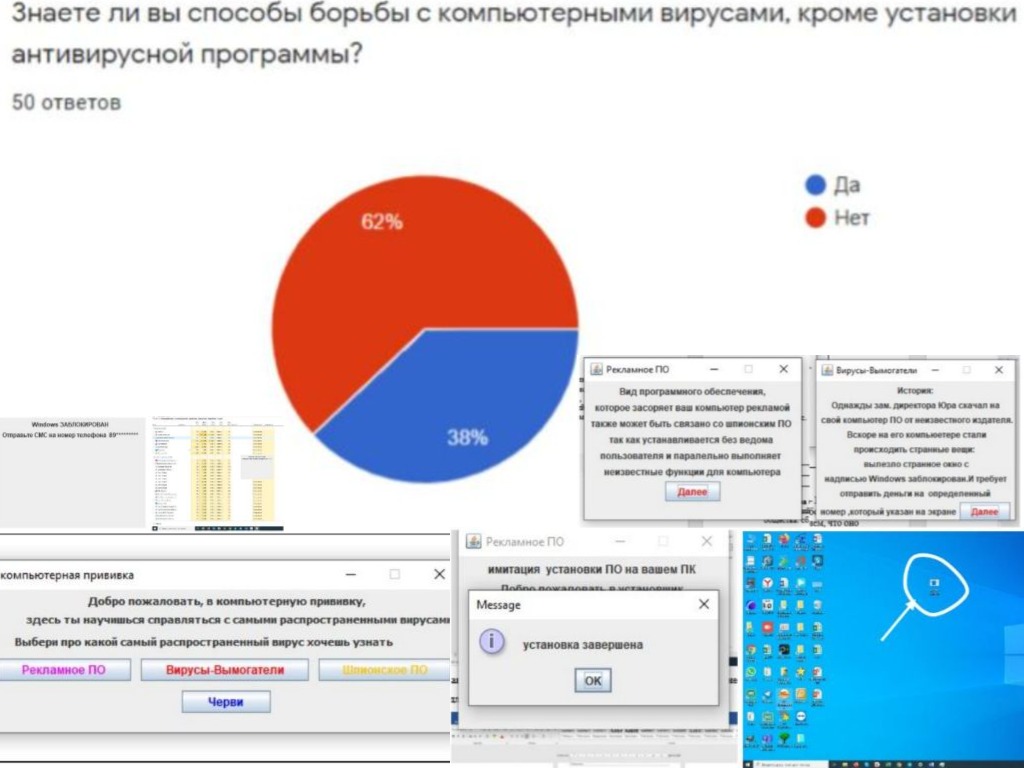
КИБЕРПРЕСТУПНОСТЬ
-
Описание проекта
Индивидуальный проект по теме киберпреступность посвящен анализу проблемы безопасности в сфере IT-технологий. В проекте представлен генератор паролей, который создает надежные пароли для защиты личной информации в интернете. Представленный проект помогает повысить уровень информационной безопасности и защиты личных данных в интернете.
РОБОТ-ВЕЗДЕХОД ДЛЯ ПОИСКОВО-РАЗВЕДЫВАТЕЛЬНЫХ ОПЕРАЦИЙ
-
Описание проекта
Удалось создать устройство, обладающее высокой проходимостью, способное выполнять поставленные задачи дистанционно, в том числе и вне зоны видимости оператора. Удалось реализовать управление манипулятором, установленном на борту робота.
В настоящее время проект находится в доработке. Среди планов на будущее можно выделить внедрение периферии для реализации выполнения задач без вмешательства оператора.
АВТОНОМНЫЙ ЛУНОХОД ДЛЯ СБОРА ПРОБЫ ГРУНТА
-
Описание проекта
Робот создан для сбора лунной пыли с целью ее исследования. Каждое место забора пробы лунной пыли отмечается работающим маячком. Для установки маяка используется манипулятор сброса.
Робот выполнен из двух конструкторов: lego ev3 mindstorms, основание робота из металлических балок makblock и эвольвектор.
Ходовая часть робота - гусеничный ход, оснащен 4 автономными гусеницами каждая их которых управляется отдельным двигателем. Сборные гусеницы обеспечивают повышенную проходимость конструкции. Четыре двигателя отвечают за перемещение робота. Робот оснащен ультразвуковым датчиком на передней подвеске. Ультразвуковой датчик контролирует попадание в кратер. Если ультразвуковой датчик фиксирует резко увеличивающееся расстояния до поверхности земли - робот останавливается.
Ходовая часть управляется отдельным контроллером.
Из lego выполнены конструкции 2х манипуляторов, один из которых выполняет забор робы грунта, а второй устанавливает маячек в месте забора. Манируляторы управляются одним контроллером, и состоят из 1х больших сервомотора, одного среднего, одного инфракрасного датчика и нескольких инфракрасных маяков.
Робот имеет две независимые программы управления: рабочий ход для забора пробы и возвращение на базу. Возвращение робота на базу осуществляется по программе "следование за маяком", для чего используется "маяк", настроенный на 1 канал связи. Все остальные маячки, которые сбрасываются при заборе грунта отвечают за отметки места забора и работают на каналах связи 2-4.
ИССЛЕДОВАНИЕ КОНСТРУКЦИИ МОДЕЛИ ВОДОПОДЪЕМНОГО КОЛЕСА
-
Описание проекта
Колесо активно используется во многих сферах жизнедеятельности человека: в различных механизмах и практически во всех видах техники, а также в быту. Трудно себе представить, что делало бы человечество без изобретения этого простого, но важного элемента.
Цель проекта: собрать и провести исследование модели водоподъемного колеса.
На занятиях по робототехнике я решила создать водоподъемное колесо. Балки были скреплены между собой штифтами, всего потребовалось 12 балок, конструкция получилась подвижная и не держала форму. Вот, оказывается, для чего нужны спицы в колесе! В устройстве было установлено 8 спиц. Для крепления спиц в центре колеса использовались ступицы, особые детали с отверстиями на окружности цилиндра.
Спицы придали конструкции прочность и жесткость, а ступицы обозначили центр окружности и послужили точкой вращения колеса. Затем колесо было установлено на платформе со стойками.
В качестве черпаков использовались пластины, всего было установлено 12 черпаков. Мотор был установлен на стойке, коммутатор крепился к основанию.
Код состоял из двух блоков «вращение мотора по часовой стрелке», "мощность мотора". В процессе отладки была найдена оптимальная мощность вращения мотора, она равна 3. Это позволило колесу вращаться плавно. Принцип работы колеса: вращаясь, колесо, захватывает воду черпаками и выбрасывает ее в сливной желоб. Далее вода поступает по желобу к растениям. Таким образом, осуществляется их полив.
ПУТЕШЕСТВИЕ В МИР 3D ТЕХНОЛОГИЙ
-
Описание проекта
3D печать не удивительная технология будущего, а уже реальность, у которой большое будущее.
3D-технологии применяют в архитектуре, строительстве, медицине, дизайне, производстве одежды и обуви и других сферах.
Печатать на 3D-принтере можно по готовым инструкциям.
ИЗУЧЕНИЕ И ПРАКТИЧЕСКОЕ ПРИМЕНЕНИЕ ГРАФИЧЕСКИХ ВОЗМОЖНОСТЕЙ ПРОГРАММЫ POWER POINT
-
Описание проекта
Цель работы: разработать анимационный интерактивный мультфильм.
По сценарию местом действия была выбрана лужайка с цветами и пнем, по которой путешествует мой главный герой – цыпленок. Время действия – день. Состояние природы: солнечно, по небу плывут кучевые облака, на поляне растут разноцветные цветы. Цыпленок и пень располагаются на слайде по правилам «золотого сечения». Основные действия героя: начинает передвигаться по поляне по щелчку мыши. Следующий щелчок переместит персонажа на пенек и запустит анимацию вращения солнца и цветов на поляне.
Процесс создания анимации объектов меня очень увлек, при определенном уровне подготовки можно создавать более длительные мультфильмы с развернутым сюжетом, хорошим звуком и плавным действием. И все это возможно сделать стандартными средствами Power Point. Этот опыт работы с анимацией поможет мне в изучении более сложных специализированные программы для создания мультипликационных фильмов.
РАЗРАБОТКА И СОЗДАНИЕ МАГНИТНЫХ УЛОВИТЕЛЕЙ
-
Описание проекта
Я предлагаю установку магнитных уловителей на робот-пылесос, автомобиль или другую технику. Для достижения цели надо были решены следующие задачи:
- Придумано применение магнитного уловителя
- Созданы и испытаны опытные образцы
- Оценена коммерческая эффективность
Оценена социальная важность применения уловителей.
РАЗРАБОТКА И СОЗДАНИЕ КОММЕРЧЕСКИХ ШРИФТОВ И ШРИФТА БРАЙЛЯ
-
Описание проекта
Я предлагаю масштабируемые шрифты и создание табличек для слепых людей для выполнения любого технического задания заказчика.
Для достижения цели надо было решить следующие задачи:
- Разработать масштабируемый программный продукт
- Испытать производство опытных шрифтов и табличек
- Выполнить на 3D принтере опытные образцы
Оценить коммерческую эффективность и социальную важность.
БОКС ДЛЯ ВЫРАЩИВАНИЯ РАСТЕНИЙ В КОСМОСЕ ИЗ КОНСТРУКТОРА LEGO MINDSTORMS EV3
-
Описание проекта
Проект собран из двух конструкторов: lego ev3 mindstorms и makeblock.
Резервуаром для теплицы служит платиковый контейнер, в крышке которого мы сделали отверстия для оси вентелятора и трубки.
Система собрана на жестком каркасе из балок конструктора makeblock и эвольвектор, на котором размещаются компоненты электроники от lego ev3 mindstorms: два больших сервомотора, один датчик касания, один датчик цвета и один контроллер.
Теплица выполняет три операции: полив, проветривание и освещение.
Полив контролируется одним большим сервомотором и датчиком касания. При нажатии датчика вода начинает поступать из резервуара в бокс с растениями. При отжатии подача воды останавливается. Второй большой сервомотор запускает вентилятор проветривания.
Одновременно с циклом проветривания и полива работает датчик цвета в режиме яркость внешнего освещения. При снижении яркости внешнего освещения система издает звуковой сигнал “ Немедленно включите освещение” .
На видео можно наблюдать, как система выдает голосовое сообщение при закрытии датчика рукой
Видео: https://youtu.be/9I6vzSrH0yQ
МНОГОФУНКЦИОНАЛЬНЫЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР "ПУЛЬВИК"
-
Описание проекта
Создан прототип многофункционального робота для решения бытовых вопросов.
Корпус устройства сконструирован таким образом, чтобы в него могли помещаться разные ёмкости с жидкостями: вода, жидкое мыло, антисептик, аэрозоль и так далее. В зависимости от необходимого объема жидкости, можно собрать соответствующего размера корпус.
Существуют разные рабочие режимы устройства в зависимости от цели назначения:- при движении руки ребенка, устройство будет приходить в движение и выдавливать порцию мыла;
- при интервальном режиме, будет осуществляться автоматический полив растения, добавление воды в миску питомца и так далее;
- при необходимости можно настроить работу устройства по нажатию кнопки.
Устройство способно «общаться» с ребёнком посредством «смайлов» и обратного отсчёта, что позволяет заинтересовать ребенка в гигиенических процедурах (мытье рук, чистка зубов).
ШАХМАТНЫЙ ТРЕНАЖЕР "СТРАТЕГИЯ"
-
Описание проекта
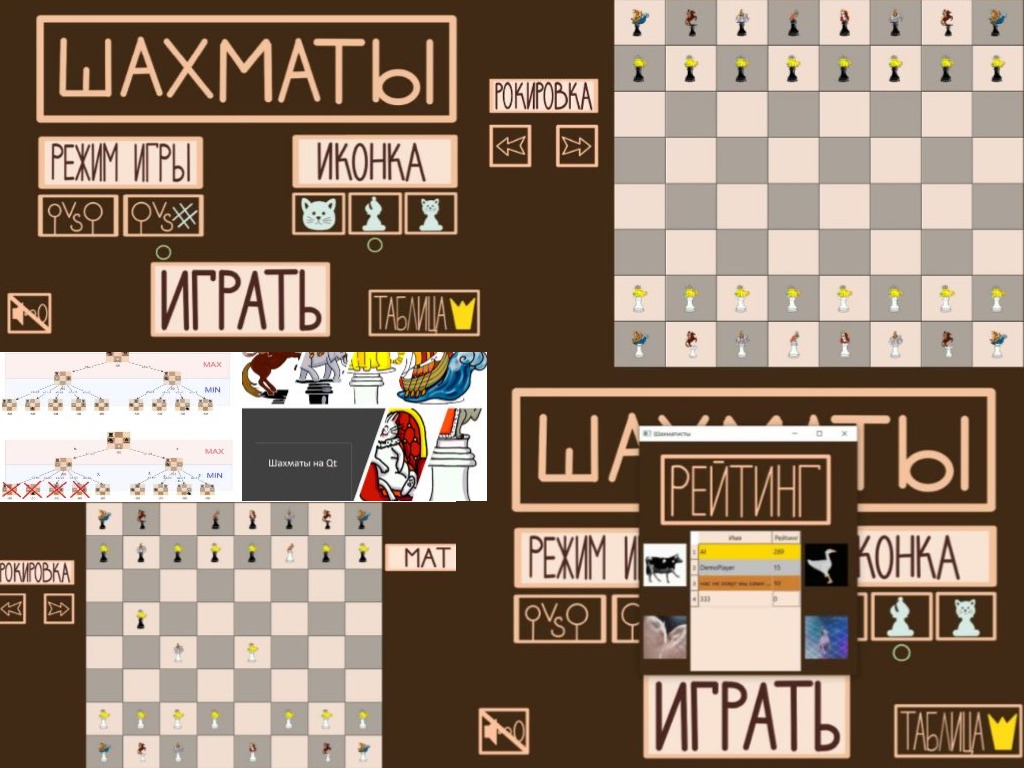
Шахматный сайт "Стратегия" - это тот сайт, который идеально подходит для изучения шахмат. На сайте присутствует таблица лидеров, а также возможность сыграть в шахматы с искусственным интеллектом. Игра делится на три уровня сложности - от простого к сложному. Ход вводится пользователем в соответствии с шахматной нотацией, после чего, если ход оказался корректным, свой ход совершает шахматный движок. Помимо сайта есть телеграмм бот Стратег, который может научить играть в шахматы с нуля.
Его функции:
- Обучение игре в шахматы.
- Шахматный словарь (пользователь может познакомиться с терминами из мира шахмат).
- База дебютов (пользователь может изучить различные виды дебютов и гамбиты).
- Биография великих шахматистов.
- Решение шахматных задач (нужно найти лучший ход по данной позиции на доске).
- Интересные факты о шахматах.
MATH DUELS
-
Описание проекта
Игра с возможностью выбора количества игроков (один игрок против ИИ, два игрока).
В игре на одного человека присутствует сюжет, разделение на 3 главы, в каждой своя локация и противники, в переходе между противниками появляется игровая карта для передвижения главного героя.
Основная задача игроков – написать пример, подходящий под требования проверки, используя при этом как можно больше математических операций, после этого правильно решить свой пример (если это игра на двоих - присутствует возможность решить пример соперника, тем самым убавить получаемый урон), после этого будет считаться сумма очков и, если она больше, чем у противника - урон наносится сопернику, если меньше, то игроку. Всё это сопровождается различными анимациями (в зависимости от операции, используемой максимальное количество раз - происходит разная атака).
3D-МОДЕЛИРОВАНИЕ В ПО КОМПАС: ЛЕГО-ШАТТЛ И КРЕПЕЖ
-
Описание проекта
Представляю мой проект – 3D-модель лего-конструктора – космический корабль шаттл с ракетой-носителем и кондуктора - одного из разновидностей станочных приспособлений, применяемых при обработке отверстий на сверлильном станке.
Создал 3D-модель, сборочный чертеж, спецификацию и чертежи деталей, входящих в сборку.
Универсальность платформы под кондуктор в том, что можно использовать кондукторы с разными габаритными размерами оснований, и закреплять их, что удобно в работе. Это достигается вставками вкладышей под разные виды кондукторов, с разными габаритами.
ПРОЕКТИРОВАНИЕ ПРИСПОСОБЛЕНИЯ ДЛЯ ЗАТОЧКИ СВЕРЛА
-
Описание проекта
Главная суть приспособления заключается в том, что сверло располагается в призме сразу под определенным углом и в зависимости от требуемого нам угла мы можем регулировать его, перемещая призму (в котором располагается сверло) вдоль корпуса под определенным углом. При необходимости мы можем перевернуть призму, чтобы заточить сверло, с другой стороны, тем самым обеспечить параллельность ленточек.
С помощью приспособления можно производить заточку, спиральных свёрл, свёрла с прямыми канавками и перовое.
СТЕГАНОГРАФИЯ НА ОСНОВЕ LSB-МЕТОДА
-
Описание проекта
Стеганография - способ передачи или хранения информации с учётом сохранения в тайне самого факта такой передачи. Как правило, сообщение будет выглядеть как что-либо иное. Например, как обычное фото или статья в журнале.
Целью работы является создание программы, прячущей в исходное сообщение или изображение скрытый текст.
Метод наименее значащих битов (LSB) основан на ограниченных возможностях человеческих органов чувств, в силу чего люди не способны различать незначительные вариации цветов. Поэтому замена одного или двух младших, наименее значащих битов, на другие произвольные биты настолько незначительно исказит оттенок пиксела, что зритель просто не заметит изменения. Именно так и работает наша программа. Для реализации идеи текстовой стеганографии мы использовали идею замены символов, которые имеют одинаковое написание и в английской, и в русской раскладке.
Стеганография – это молодое развивающееся направление, которое имеет широкое применение в настоящий момент и большие перспективы развития в будущем. С её помощью решаются проблемы авторского права, а также безопасности передачи информации, например, в военной ситуации.
ИГРА НА PYGAME
-
Описание проекта
Наш первый командный проект - игра на языке Python с использованием библиотеки Pygame - библиотеки для создания игр, анимаций, уровней и так далее. Мы сделали полноценную игру с двумя видами зелий, пятью видами оружий, подсчетом очков, большим количеством монстров и финальным боссом, который ждёт в конце пятого уровня. Нельзя сказать, что пройти игру сложно, однако и легкой прогулкой по парку это также назвать нельзя. При должной сноровке игру можно пройти без смертей за 15-20 минут, но если это первый раз, когда Вы пробуете в неё играть - так быстро пройти не получится.
ЭНДОПРОТЕЗ ГЛАЗА С ИМПЛАНТИРУЕМОЙ МОЗГОВОЙ ЭЛЕКТРОДНОЙ МАТРИЦЕЙ ДЛЯ ЗАМЕЩЕНИЯ УТРАЧЕННОГО ЗРЕНИЯ
-
Описание проекта
Предлагаемый проект представляет собой развитье ранее предложенного подхода стимуляции зрительной области коры мозга микроэлектродной матрицей для формирования картинки. Проект нашел воплощение в комплексе, состоящем из микроэлектродной матрицы, генерирующей возбуждение нейронов в соответствии с матрицей, полученной с камеры. Основой комплекса будет служить имплантируемая матрица в форме диска (что близко к форме зрительной зоны мозга) из биосовместимого полимерного гидрогеля с равномерно распределенными золотыми электродами с контактной площадкой диаметром 15мкм (т.к. размер колонки зрительной части коры считается равным 30-50мкм). Такой размер выбран для того чтобы избежать возбуждения соседних нейронов.
Ключевым моментом успешной интеграции имплантат, является создание цифровой карты интенсивности и плотности сигнала, таким образом, чтобы в процессе реабилитации пациента распределение плотности сигналов могло быть откорректировано в центральной и периферийной зоне зрительной коры. Кроме того, доложена быть смоделирована функция вибраций глаза - макросаккады, что крайне важно для правильного формирования картинки мозгом.
ЦИФРОВОЙ ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ХАКАТОНА "CITY HEROES"
-
Описание проекта
Проект представляет собой описание разработанного программного решения (web-приложение и система ботов), которое позволяет автоматизировать процесс организации IT-мероприятия CityHeroes, включая регистрация участников посредством приложения, создание команды, подбор участников команды, взаимодействие организаторов и участников мероприятия посредством рассылки постов в социальных сетях и уведомлений в приложении, судейство команд и др.
В проекте использованы современные технологии серверной и клиентской web разработки. Такие как: typescript, node js(express), Astro, svelte.
Практическая значимость работы заключается в оптимизации организации и проведения массовых мероприятий с применением современных информационных технологий.
МНОГОФУНКЦИОНАЛЬНЫЙ РЮКЗАК "RELAX"
-
Описание проекта
Многофункциональный рюкзак "Релакс" – это повседневный удобный аксессуар современных людей. Мы пользовались разными рюкзаками, но не нашли идеального для нас. Мы решили усовершенствовать конструкцию рюкзака.
Мы много времени проводим в транспорте, например, по пути в школу. Иногда в транспорте хочется немножко вздремнуть. В верхнем клапане-кармане мы расположили надувная подушка. Сверху вы можете закрепить наволочку. И у вас с собой всегда чистая подушка чтобы не много вздремнуть. На спинке рюкзака расположена специальная приспособление для удержания во время отдыха.
Второе изменение конструкции – это карман, сохраняющий температуру. В рюкзаке мы расположили термо отделение для переноски перекуса или медицинские препараты. Идея добавить термо отделение пришла именно для переноски инсулина одному из членов нашей команды.
И самое главное изменение конструкции — это лямки рюкзака. Когда люди несут тяжелый рюкзак, их плечи устают. Для нашего рюкзака мы разработали, создали и протестировали специальный массажный элемент на основе микровибромоторов. Вы можете нажать на кнопки в лямках рюкзака и благодаря вибрации моторов расслабить мышцы плеч. Массажный элемент съемный, его можно доставать при стирке рюкзака или для замены батарейки. Положение массажного элемента внутри лямок можно настраивать.
УМНАЯ СИСТЕМА РАННЕГО КОНТРОЛЯ ЗА ВОДНЫМИ БАССЕЙНАМИ ГЭС С АВТОМАТИЗИРОВАННЫМ ВОДОСБРОСОМ
-
Описание проекта
Гидроэлектростанция - это сложное инженерное сооружение, пользу которого для человека сложно переоценить. В проекте представлено инновационное устройство для контроля за водным бассейнам гидроэлектростанции. Его применение позволит исключить избыточный приток воды (например, при паводке) и решит проблему размыва дна бассейна за счёт эффективного гашения энергии потока сбрасываемой воды.
МОДЕЛИ ШАХМАТНЫХ ФИГУР ДЛЯ 3D-ПЕЧАТИ
-
Описание проекта
Важность умений работать с 3D моделями и принтером неоценима, т.к. на любом производстве постоянно будет что-то ломаться и возможность быстро восстановить аппаратуру на короткий промежуток времени всегда будет ценна в рабочей среде.
В работе спроектированы модели каждой шахматной фигуры и напечатаны на 3D принтере.
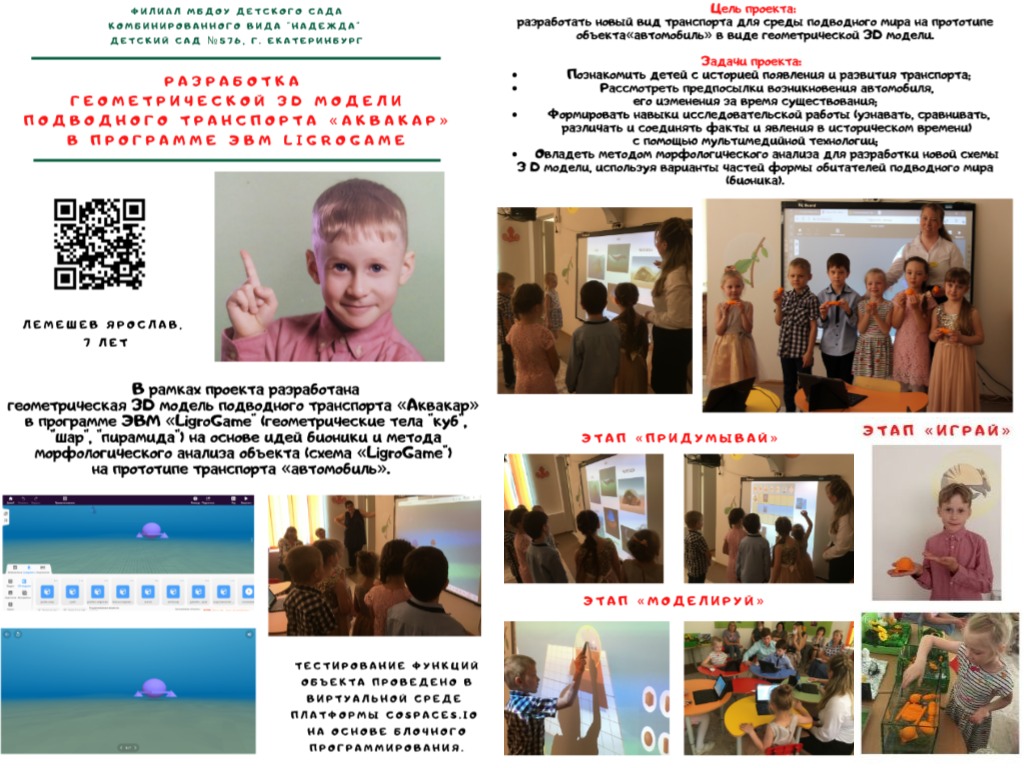
РАЗРАБОТКА ГЕОМЕТРИЧЕСКОЙ 3D МОДЕЛИ ПО ТЕМЕ "ЛУНОХОД" В ПРОГРАММЕ ДЛЯ ЭВМ "LIGROGAME"
-
Описание проекта
Луна – единственный естественный спутник Земли. Ученым всегда хотелось разгадать лунные загадки, поэтому на Луну отправляли космические экспедиции.
У нас возникла идея – разработать свою геометрическую модель лунохода в программе 3D моделирования «LigroGame» и «оживить» её в виртуальной реальности программы и реализовать на 3D принтере.
ПОЗНАВАТЕЛЬНО-ИССЛЕДОВАТЕЛЬСКИЙ ПРОЕКТ "ГРУЗОПОДЪЁМНАЯ ТЕХНИКА"
-
Описание проекта
Что такое грузоподъёмная техника, когда человек изобрёл её, и как она изменилась от древности до сегодняшнего дня? Как правильно управлять краном? Какие механизмы помогают поднимать грузы и как они устроены? На эти вопросы дошкольники искали ответы в рамках проекта "Грузоподъёмная техника".
В столярной мастерской дошкольники изготовили лэпбук, в который поместили всю найденную информацию. Конструктор йохокуб стал средством для моделирования башенного крана. Чтобы модель стала функциональной и могла поднимать грузы, был разработан грузоподъемный механизм "втулка".
Для этого составлена знаково- символическая карта будущего объекта, которая стала основой для моделирования 3D объекта "втулка" в программе ЭВМ "LigroGame". Данная модель была реализована на 3D печати и закреплена на кране. Тестирование функций объекта проведено в ролевой игре "Крановщик и стропальщик".
РАЗРАБОТКА ГЕОМЕТРИЧЕСКОЙ 3D МОДЕЛИ ВОЕННОЙ ТЕХНИКИ ПО ТЕМЕ "ТАНК" В ПРОГРАММЕ "LIGROGAME"
-
Описание проекта
Распечатанная 3D модель "танк" реализована в настольной игре-ходилке "Танки":
- в игру входит комплектация: игровое поле, распечатанные 3D модели - 2 танка, кубик, инструкция;
- оригинальная настольная игра поможет в интересной форме изучить процесс танкового боя.
В процессе игры дети смогут научиться считать - в этом им поможет игральный кубик и перемещение по игровому полю.
РАЗРАБОТКА ГЕОМЕТРИЧЕСКОЙ 3D МОДЕЛИ "КОСМИЧЕСКОЕ КОЛЕСО ОБОЗРЕНИЯ" В ПРОГРАММЕ ЭВМ "LIGROGAME"
-
Описание проекта
В образовательном пространстве информационно-коммуникационные технологии используются как средства интерактивного обучения, которые позволяют преодолевать интеллектуальную пассивность, повысить мотивацию, стимулировать познавательную активность детей.
За основу проекта мы взяли любимые развлечения детей - это посещение парков аттракционов. Проекты были ориентированы на тему космоса, то действуя с геометрическими формами для создания объектов в цифровой среде Ligro Game мы создали 3D модель космического колеса обозрения ("конус", "капсула", "шар", "тор", "полушар".) На основе идей и анализа объекта ( схема "LigroGame") на прототипе аттракцион "колесо обозрения".
ЭКЗОСКЕЛЕТ
-
Описание проекта
Мы создавали наш «экзокостюм» для проблем, которые могут возникнуть в космосе связанные со спасением жизни человека или исследованием сложно доступных мест.
Этот экзокостюм рассчитан для людей, которые летают в космос, для того чтобы исследовать неизвестные планеты.
Этот проект будет достаточно востребован, даже элементарно не хватка кислорода. Благодаря костюму можно уходить на более дальние расстояния от транспорта передвижения.
Наш проект будет достаточно удобен в использовании. Будет позволять делать то, что обычному человеку не под силу. Увеличит силу, скорость и массу. Снизит напряжение со спины человека и ног. А значит человек дольше будет в тонусе и сможет проделать больше работы.
На костюм можно надеть рюкзак, который позволит носить гораздо большее количество вещей, такие как: аптечки, кислородные баллоны или носилки, в зависимости от необходимости.
Скорость и сила у нашего костюма будет увеличена в несколько раз.
Мы предлагаем использовать ионный двигатель.
Управляться наш экзоскелет будет благодаря сканированию человека, находящегося внутри. По периметру в костюме находятся камеры. Они считывают движения и передают роботу, а тот в свою очередь моментально повторяет. А так же на случай поломки камер, можно подключить проводки к конечностям человека. Качество передачи движений не снизится.
СОЗДАНИЕ СЕТЕВОГО ИГРОВОГО ДВИЖКА
-
Описание проекта
Проект о написании библиотеки для работы с сетью и создания игрового движка с её использованием. Реализация проекта осуществлялась с использованием архитектурного шаблона Entity-Component-System, что позволило сделать движок гибким. Полученный результат – прототип API для создания сетевых игр и гибкий игровой движок с поддержкой многопользовательской игры.
РАЗРАБОТКА И РЕАЛИЗАЦИЯ СИСТЕМЫ ПОСТРОЕНИЯ ОТКРЫТОГО ПРОСТРАНСТВА
-
Описание проекта
Проект посвящен разработке системы визуализации трехмерных сцен, содержащих большие объемы геометрических данных. Система включает в себя разработанный конвейер вывода, оптимизированный на работу с современными видеокартами, и объектную модель представления элементов анимации, что упрощает создание сцен и моделирование открытых пространств.
СИСТЕМА МОДЕЛИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ГОРОДСКОЙ СРЕДЫ
-
Описание проекта
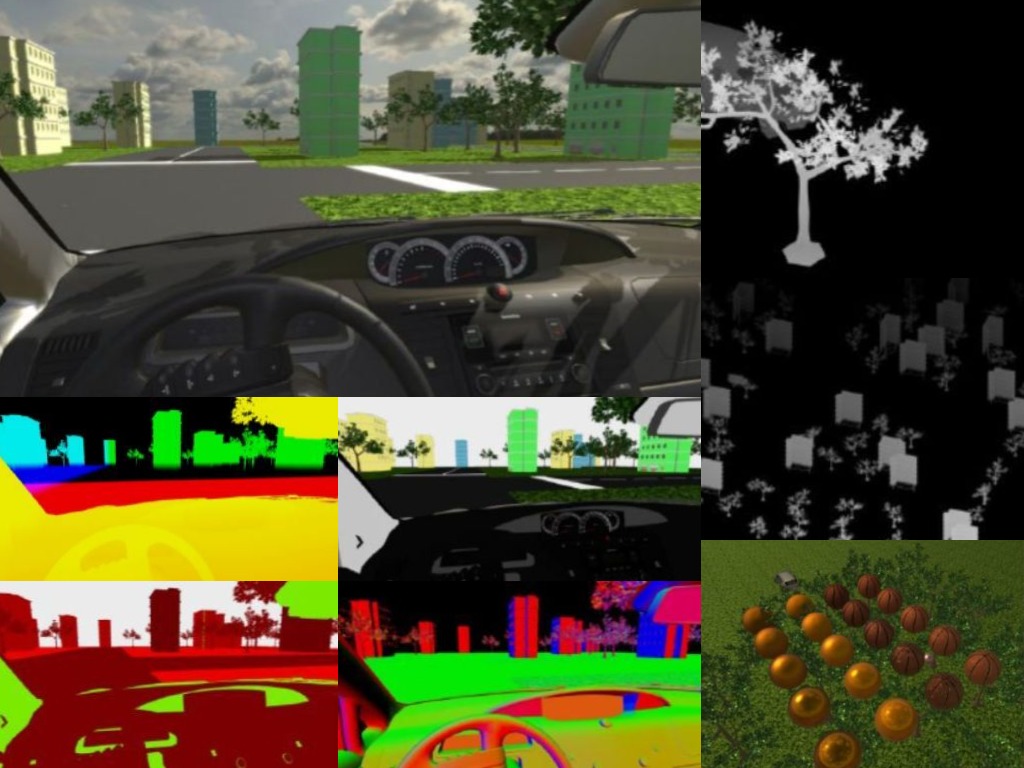
Нашей командой был создан проект TMP, главной целью которого является предоставление инструментария для просчета поведения трафика, которое регулируется системой дорог и системой ландшафта. Для осуществления нашей цели, командой были поставлены следующие задачи: создание системы визуализации 3D объектов, системы просчеты поведения транспорта в реальном времени, учитывающие положения дорог на ландшафте и других объектов окружающей среды, системы моделирования ландшафта и дальнейшей работы с ним, системы управления отдельными частями транспорта, целью которой было создать связь между системой просчета поведения транспорта и системой ландшафта. В добавок к этому были разработаны вспомогательная система пользовательского интерфейса, целью которой является изменение внутренних параметров программы во время её работы.
УМНЫЙ ГОРОД
-
Описание проекта
БРЕНД ОДЕЖДЫ - TSOT
-
Описание проекта
Всем известно, что для хорошего бизнеса нужен сайт. Это удобно, когда ты можешь из любого места зайти и посмотреть товары, услуги интересующие тебя, сразу оплатить , проконсультироваться , не нужно делать запись на определенное время или же стоять очередь. Сайты очень облегчают жизнь и помогают не только покупателям, но и продавцам.
Для реализации своей бизнес идеи и её дальнейшего развития я создал Web-сайт.
TSOT: https://t.me/tsot_one
ПРОЕКТ "3D-МОДЕЛЬ МАРСОХОДА"
-
Описание проекта
Мною была успешно разработана 3D-модель марсохода, помещающегося в коническую капсулу для доставки на Марс, и создана анимация его работы в реальных условиях.
Были проведены расчеты для геостационарного спутника, который служит для наблюдения за марсоходом.
РАЗРАБОТКА WEB-ЭЛЕМЕНТОВ ДЛЯ САЙТА КОЛЛЕДЖА С ПОМОЩЬЮ BOOTSTRAP 5
-
Описание проекта
В данной работе были изучены команды для написания элементов, которые улучшают и украшают функциональность web-сайта. В проекте мы сделали следующее: окно регистрации на сайте, регистрация через социальные сети/почту, а также выпадающий список с информацией о сайте и ссылками на его страницы.
Целью создания дизайна web-элементов для сайта колледжа с помощью Bootstrap 5 является создание эстетически приятного и функционального пользовательского интерфейса.
УСТРОЙСТВО КОНТРОЛЯ ПРИЕМА ЛЕКАРСТВЕННЫХ ПРЕПАРАТОВ
-
Описание проекта
Выполнено создание аппаратно-программного комплекса (АПК), обеспечивающего контроль приема и выдачи в регулярном режиме необходимого набора лекарственных препаратов лицам, неспособным делать это самостоятельно, а также контроль минимального количества лекарственных препаратов и своевременное уведомление об их недостаточном количестве.
Техническая реализация выполнена в форме самостоятельно изготовленного робототехнического устройства на основе микроконтроллерной платформы Arduino. Внешний корпус прототипа устройства и вставляемых в него сменных модулей хранения лекарственных препаратов самостоятельно спроектированы в системе «КОМПАС-3D» и изготовлены с использованием 3D-принтера.
Механизм выдачи лекарственных препаратов состоит из сервопривода и несущей платы, напечатанной на 3D-принтере, на которой установлены пеналы хранения лекарственных средств (цилиндры необходимых диаметров). На сервоприводе закреплен диск с вырезанным сегментом, в который попадет лекарственное средство (в данном случае таблетка) в необходимый момент времени, достаточным для выдачи лекарственных средств (на этом этапе – таблеток) и устройство их выдачи (такой же вырезанный сегмент на нижнем уровне и желоб для перемещения лекарственного средства в специальный резервуар).
Разработанный аппаратно-программный комплекс оснащен удобной системой ввода/вывода информации, оповещения и может работать в двух режимах: 1) по заранее заданному расписанию; 2) по требованию (при нажатии кнопки). Программа получает введенные данные, и на основе сравнения текущего времени и введенного подается некий конечный сигнал на сервопривод. Роль программатора выполняет Arduino.
Разработанное и реализованное роботизированное устройство может найти практическое применение, прежде всего, среди лиц пожилого возраста, а также лиц с ограниченными возможностями здоровья.
СИСТЕМА АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ ВОДИТЕЛЯ
-
Описание проекта
Целью работы является создание программно-аппаратного комплекса (ПАК), отслеживающего с помощью технологии машинного зрения состояние бодрствования водителя транспортного средства и своевременно предупреждающего его в случае непроизвольного засыпания за рулем громким звуковым сигналом для предотвращения возможных ДТП. Техническая часть ПАК выполнена на основе Raspberry Pi с подключенной на подвижном шлейфе веб-камерой. Разработана программа на языке Python, которая, опираясь на данные видеопотока с веб-камеры, в реальном времени анализирует состояние глаз водителя на протяжении всей поездки.
Центральное место в основе функционирования ПАК занимает программный модуль, реализующий алгоритм преобразования координат контрольных точек глаз в кадре в информацию о текущем состоянии каждого глаза, являющуюся основным целевым результатом выполняемых в программе математических вычислений. Выполненная разработка обеспечивает: захват изображения с веб-камеры – на основе возможностей Raspberry Pi OS и библиотеки OpenCV; передачу изображения на обработку с использованием буфера обмена; преобразование формата RGB в формат HSV; поиск необходимых контрольных точек глаз на преобразованном изображении (на основе специально обученной нейросети). Преимуществами выполненной разработки является простота установки в автомобиль любой модели, удобство использования и невысокая стоимость по сравнению с конкурентами.
ПРОГРАММНАЯ ОЦЕНКА ДОСТУПНОСТИ И ЦЕЛЕСООБРАЗНОСТИ ЗАЙМОВ РАЗЛИЧНЫХ ВИДОВ
-
Описание проекта
Целью работы является разработка программного приложения, помогающего пользователю сделать выбор наиболее выгодного займа в банках России (в зависимости от цели и суммы кредита, доходов и расходов клиента, его кредитной истории), а также предоставляющего калькулятор для анализа различных видов платежей с выводом отдельных параметров кредита с учетом введенных данных.
В качестве инструментальных средств разработки проекта использованы:
1) язык программирования Python 3.11 со средой Pycharm Community Edition – для реализации парсинга сайтов с занесением информации в базу данных, выборки информации из базы данных, программной реализации алгоритма для функционирования Telegram-бота и offline-приложения;
2) библиотеки для языка Python: BeautifulSoup (для парсинга необходимой информации с различных сайтов), TelegramBotApi (для работы с ботами в Telegram), Pillow (для вывода Telegram-ботом карточек с информацией вместо текста).
Разработанное приложение будет выполнять следующие функции:
1) обрабатывать информацию из различных Интернет-источников об условиях кредитования физических лиц в банках России;
2) давать возможность пользователю удобно занести и сохранить исходные данные;
3) анализировать данные о кредитах различных банков и подбирать клиенту наиболее выгодный для него кредит.
Промежуточным этапом реализации проекта является создание Telegram-бота, способного выполнять перечисленные функции. Конечным этапом проекта является создание соответствующего offline-приложения с удобным пользовательским интерфейсом. Выполненная разработка поможет пользователю определиться с выбором наиболее подходящего для него займа.
ПРОГРАММНАЯ СИСТЕМА ОРГАНИЗАЦИИ УЧЕБНОГО КОНТЕНТА
-
Описание проекта
Целью разработки является программная реализация web-сервиса, позволяющего пользователям удобно организовывать и хранить необходимый учебный материал, формировать индивидуальный учебный план, а также отслеживать свой прогресс по мере его прохождения.
Для реализации программной части web-сервиса использован язык программирования Python, фреймворк для backend части сайта – Django. В качестве СУБД была выбрана PostgreSQL. Разработка клиентской стороны web-сервиса выполнена на языке программирования JavaScript, с использованием библиотеки react. Возможности разработанной системы позволяют упростить процесс самостоятельного обучения.
Предлагаемая система предоставляет широкий спектр возможностей для самоорганизации. Она позволяет выводить статистику процесса обучения, группировать ресурсы и задания по темам. Также предоставляется возможность настраивать вывод статистики на главной странице, что позволяет настроить систему под себя. Выполненная разработка может найти практическое применение и в традиционном образовательном процессе.
ГОЛОСОВОЙ АССИСТЕНТ ДЛЯ РАБОТЫ НА КОМПЬЮТЕРЕ ЛЮДЕЙ С ОГРАНИЧЕННЫМИ ВОЗМОЖНОСТЯМИ
-
Описание проекта
Целью работы является разработка программы, позволяющей пользователям с ограниченными возможностями здоровья использовать персональный компьютер с помощью голосового управления.
Программная реализация выполнена на языке программирования Python 3.10 в среде разработки PyCharm, с использованием необходимых библиотек. В результате выполненной разработки создано программное обеспечение, позволяющее с помощью голосовых команд упростить пользователю выполнение следующих функций: поиск данных в интернете; управление компьютером с помощью голоса.
Для обеспечения простоты усовершенствования программного обеспечения приложение разделено на две части:
1) основной код голосового ассистента (принимает и распознает команды пользователя, реагирует на них и отправляет запросы в библиотеку на выполнение команд);
2) библиотека со всеми функциями голосового ассистента (получает запросы на выполнение команд, выполняет команды и возвращает результат выполненных команд).
Предлагаемое решение поможет пользователям с ограниченными возможностями здоровья использовать компьютер полностью, без каких-либо затруднений. Также и обычные пользователи могут пользоваться разработанным голосовым ассистентом. В будущем планируется внедрение системы управления “умным домом”.
ОЗНАКОМИТЕЛЬНЫЙ САЙТ ДЛЯ "ИГРОВОГО СЕРВЕРА" В РЕЖИМЕ MULTIPLAYER
-
Описание проекта
Целью работы является выполнение разработки веб-сайта, помогающего новым игрокам разобраться в правилах и функциях игры в жанре “role play”, обеспечить комфортную игру, а также возможность отправки заявок на игру.
При выполнении практической реализации проекта использованы следующие инструментальные средства:язык гипертекстовой разметки HTML, каскадные таблицы стилей CSS, язык программирования Python, система редактирования кода Sublime Text.
Разработанный веб-сайт с проработанным дизайном обеспечивает пользователю предоставление максимально возможного количества полезной информации по рассматриваемой игре в жанре “role play”. Кроме того, при использовании веб-сайта обеспечивается поддержка смены языка, а также возможность отправки заявок на принятие в игру нового персонажа. Разработанный веб-сайт может быть использован как игроками, уже знакомыми с “игровыми серверами” в жанре “role play”, так и теми, кто с такими серверами сталкивается впервые.
Практическая значимость выполненной разработки заключается в том, что благодаря использованию разработанного веб-сайта все новые игроки “игрового сервера” не будут устраивать хаос в первый день его открытия. Кроме того, при разборках с правилами игры можно будет всегда указать на прикрепленный к серверу соответствующий ресурс.
СИСТЕМА АВТОНОМНОГО УПРАВЛЕНИЯ ЭЛЕКТРОСАМОКАТОМ
-
Описание проекта
Целью разработки является создание программно-аппаратного комплекса (ПАК) для автоматического управления электросамокатом, обеспечивающего автономное перемещение электросамоката в пространстве по ориентировочному маршруту, с возможностью реагирования на условия внешней среды. При выполнении проекта в качестве ключевого использован принцип автопилота, который помогает электросамокату передвигаться в пространстве по заданному маршруту.
Для изготовления некоторых деталей использована технология 3D-печати с предварительным проектированием и разработкой моделей средствами Autodesk Fusion 360.
Первый управляющий центр ПАК, реализованный на основе микроконтроллера STM32F103C8T6, обеспечивает управление коллекторными и шаговыми двигателями, линейным актуатором тормоза, поддерживает равновесие электросамоката с помощью 9-ти осевого IMU-сенсора.
Второй управляющий центр, реализованный на базе Nvidia Jetson Nano, обеспечивает планирование траектории движения электросамоката путем нахождения препятствий в окружающей среде и прогнозирования их движения. Разработка программной части ПАК выполнена с использованием языков Python и С++, совместно с фреймворком ROS2 Humble.
Центральное место в программной реализации занимает обучение сверточной нейросети для обеспечения ориентирования самоката в пространстве. Преимуществом разработанного ПАК является полностью автономная система управления электросамокатом. Практическая значимость результатов разработки заключается в увеличении пользования электросамокатами благодаря более удобному и доступному поиску ближайшего электросамоката и облегчению замены аккумуляторных батарей у самокатов из-за отсутствия необходимости несистематизированного объезда каждого из них.
ТЕЛЕГРАММ БОТ ДЛЯ БАЙТИКА
-
Описание проекта
Мы с командой написали телеграм-бота для летних курсов и смен Байтика, который поможет людям своевременно получать необходимую информацию. Если же информации оказалось недостаточно, всегда можно позвонить или связаться с Байтиком через почту, указанные в соответствующем меню "Контакты" в боте.
Бот уже работает на сервере и помог не одному человеку. При необходимости администраторы могут добавить новые курсы и вопросы через админку, и бот автоматически создаст кнопки в нужном разделе. Для этого не нужно обладать никакими навыками программирования. Изменения у всех пользователей отразятся моментально.
Ссылка на проект: https://t.me/Summer_Courses_Bytic_Bot
ШКОЛЬНЫЙ МУЗЕЙ В VR 360
-
Описание проекта
Наш новый школьный проект на платформе PanoQuiz, где мы рассказываем о героях, значимых местах и достопримечательностях, нашедших отражение в Школьном музее ГБОУ СОШ №12 города Севастополя.
САЙТ "ИНТЕРНЕТ-МАГАЗИН "Я РИСУЮ"
-
Описание проекта
Я сделала сайт "Интернет-магазин "Я рисую", чтобы продавать свои картины, а в будущем, возможно, ещё и картины других людей РФ и дружественных для России стран, кто пожелает. Я надеюсь, что у меня получится реализовать свою задумку, и сайт Вам покажется удобным и интересным.
Ссылка на проект: http://in2mag0TIK2resyu3.wd.bytic.ru

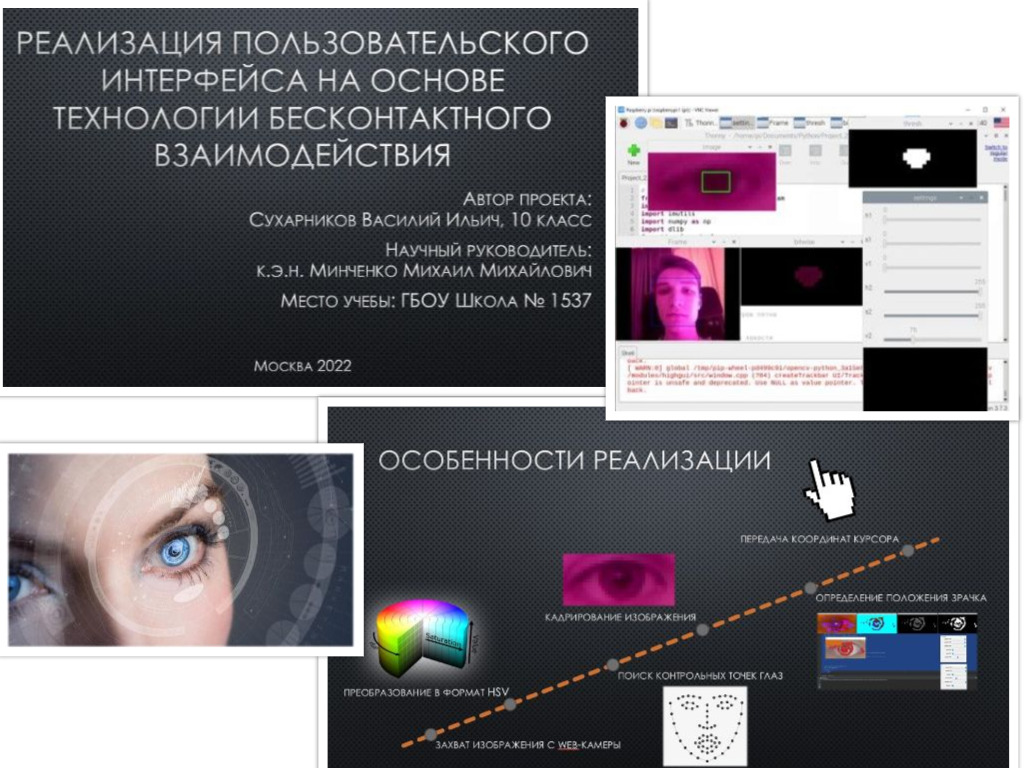
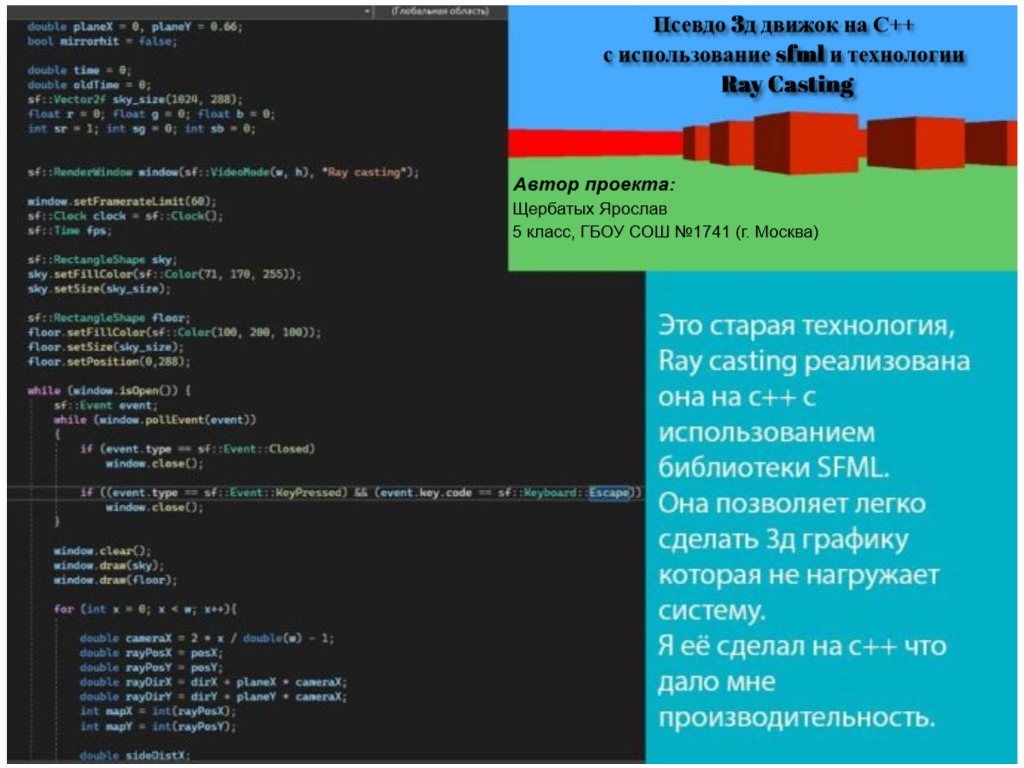
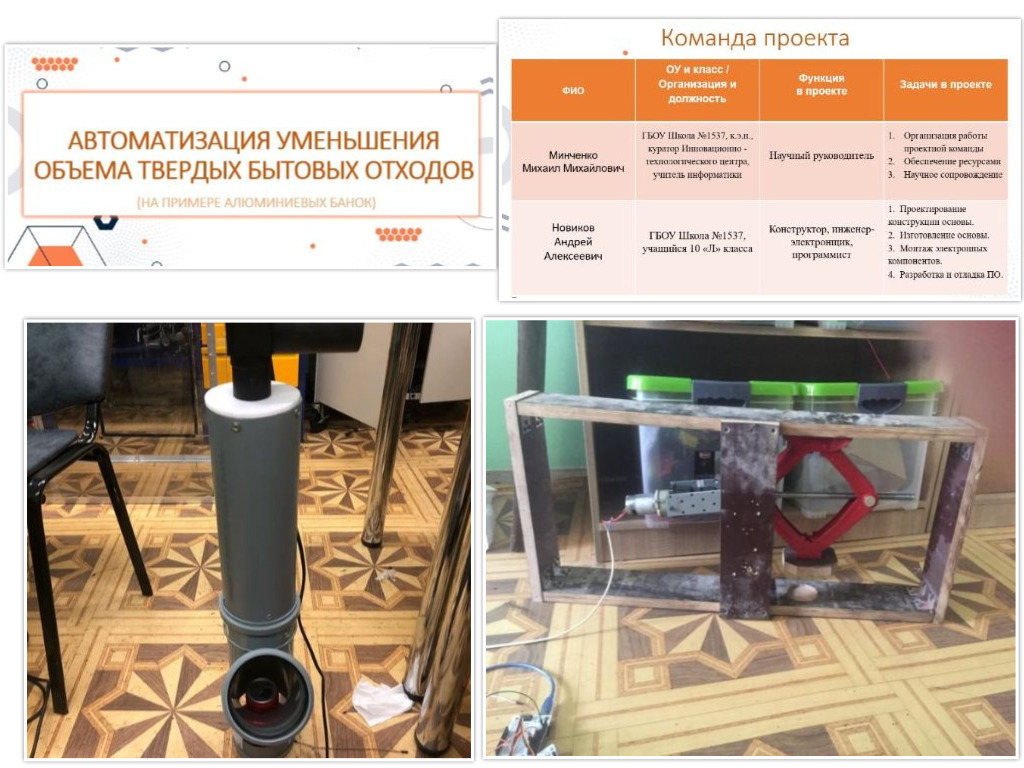
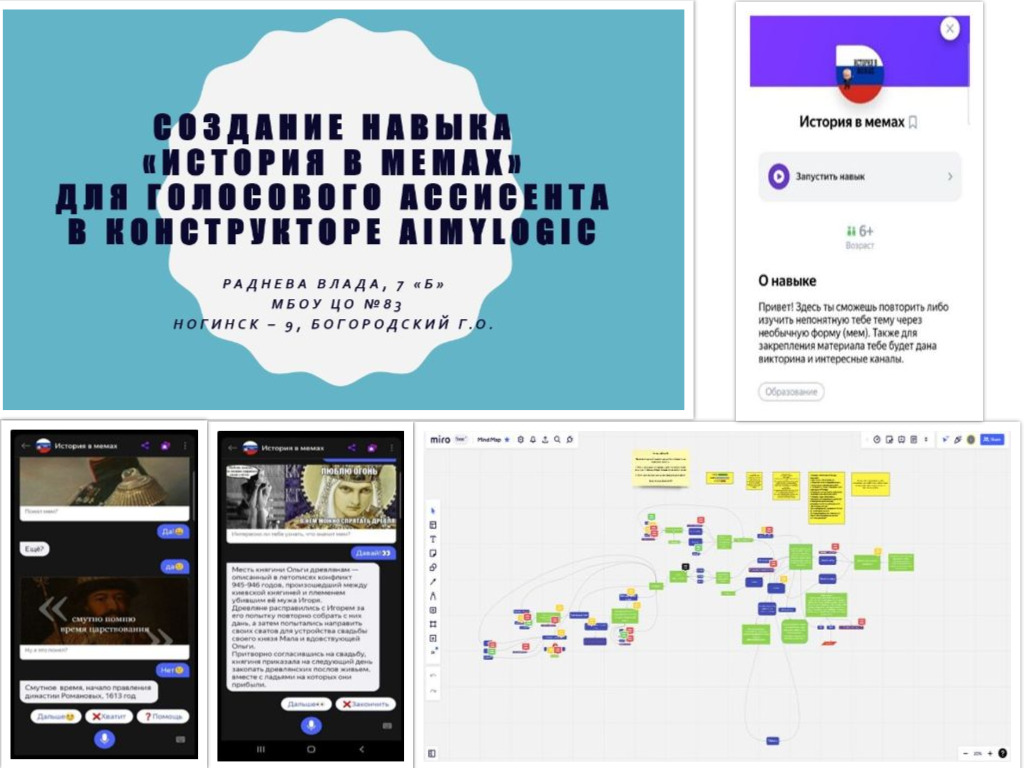



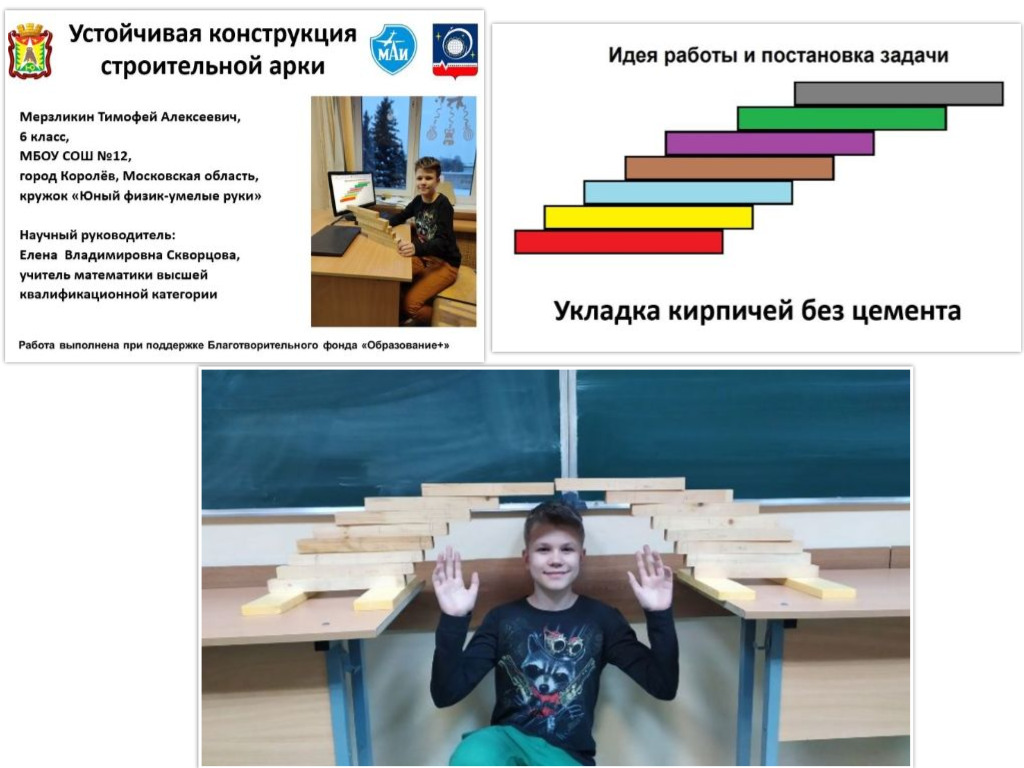
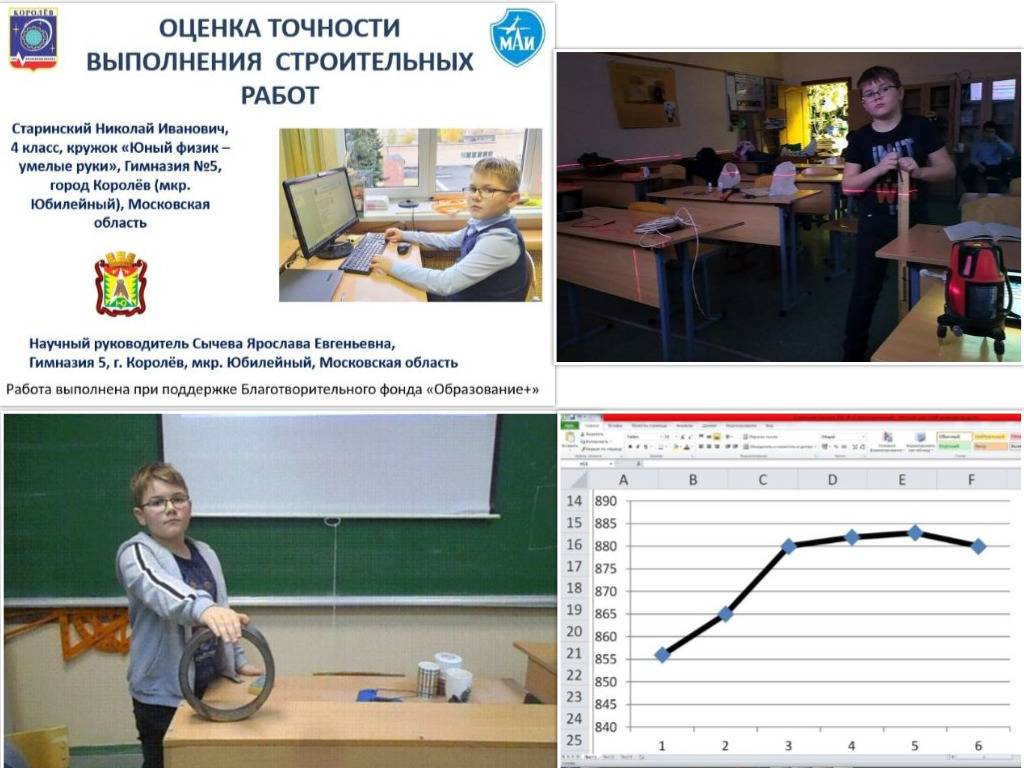

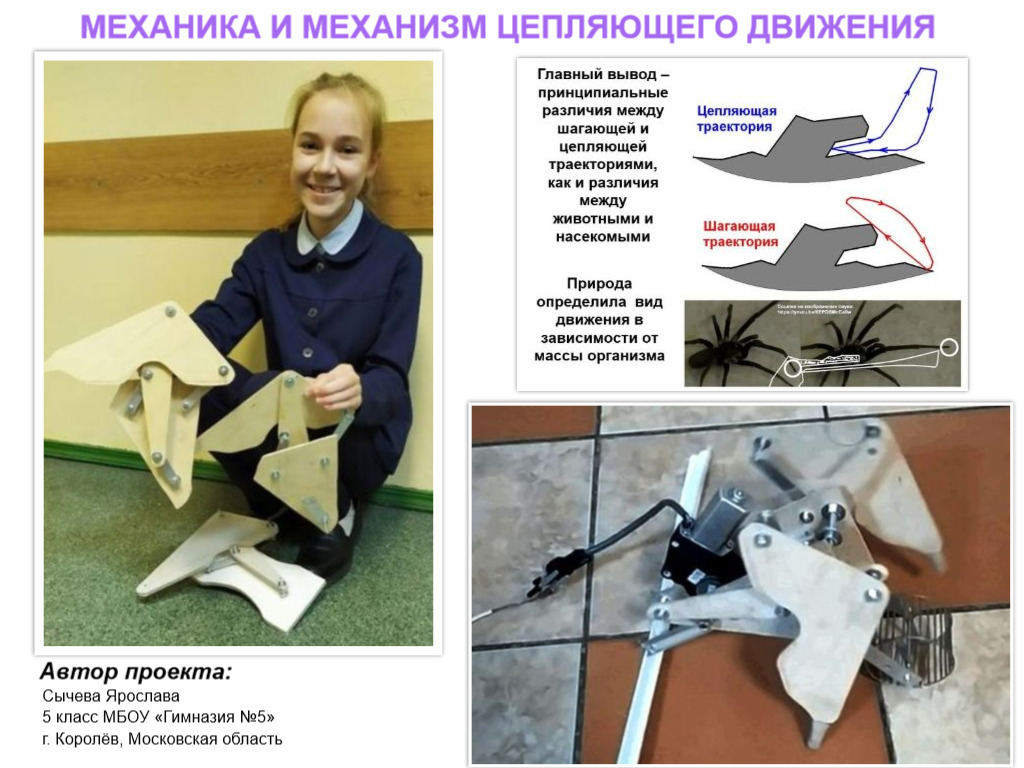


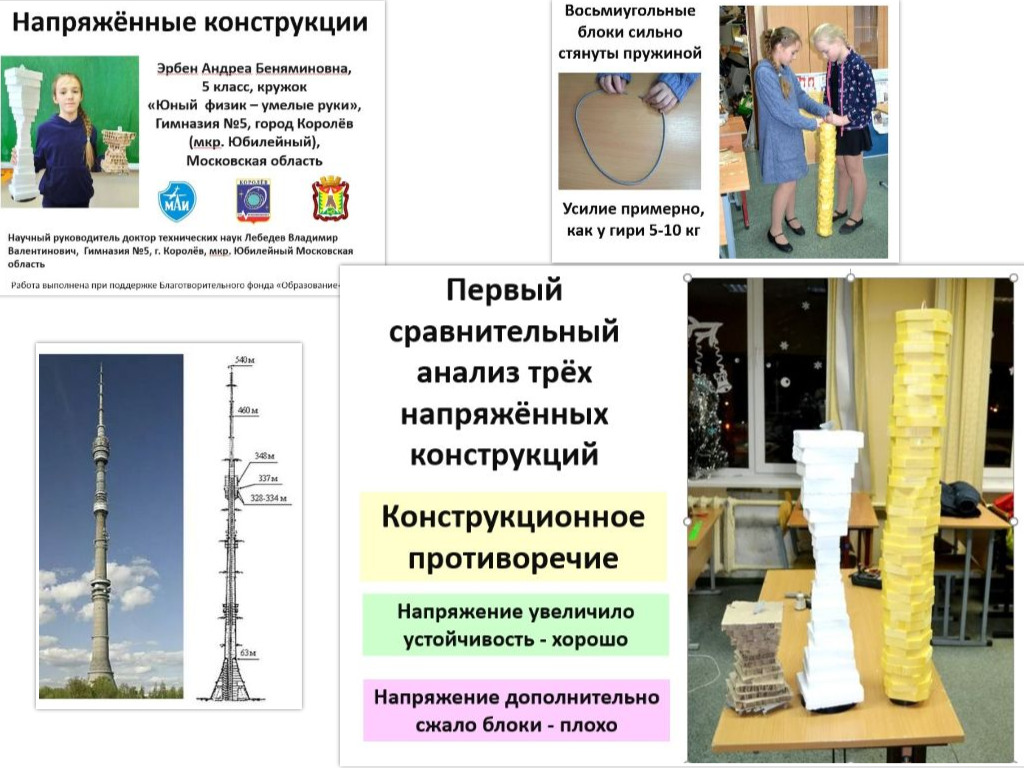


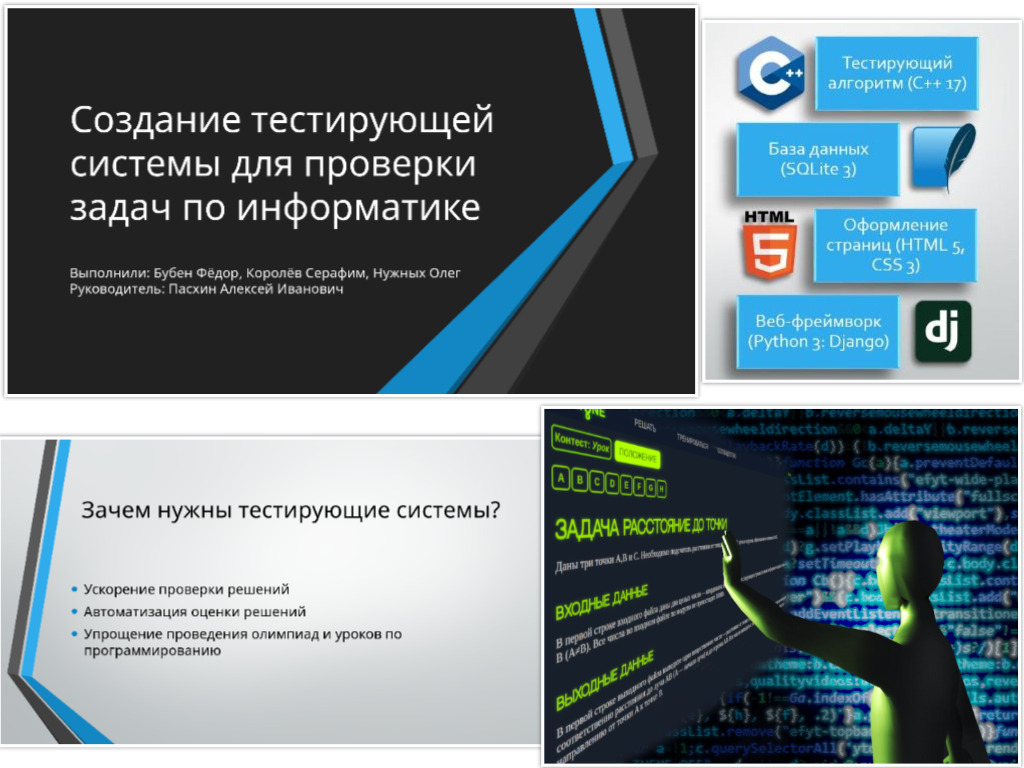
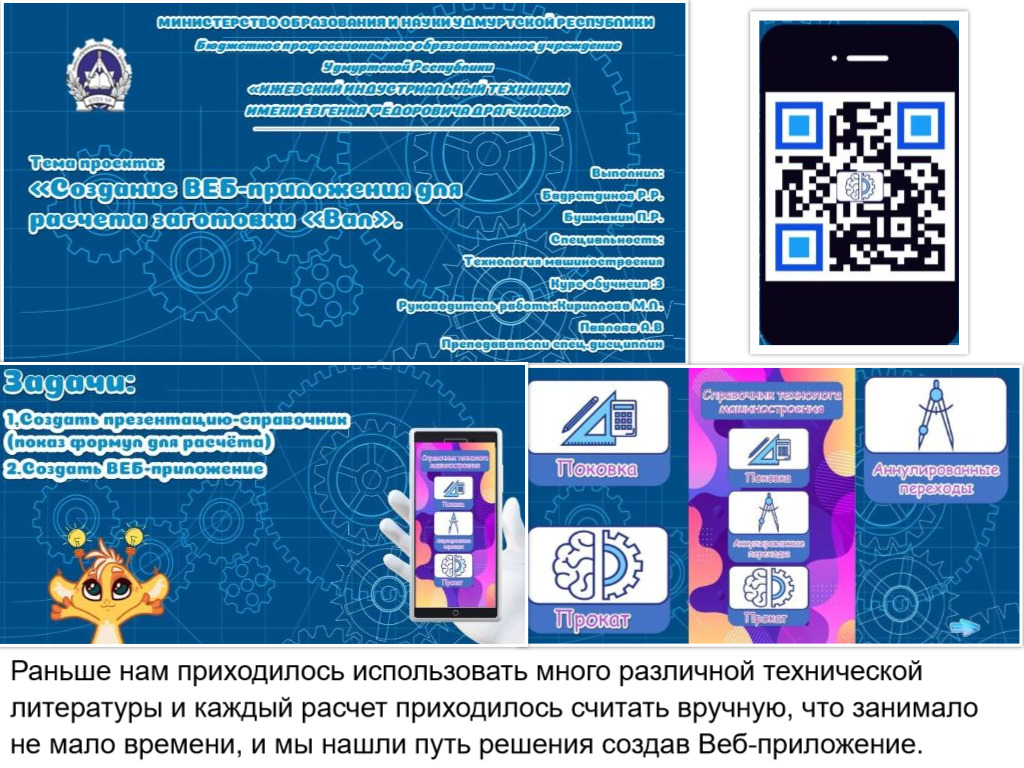

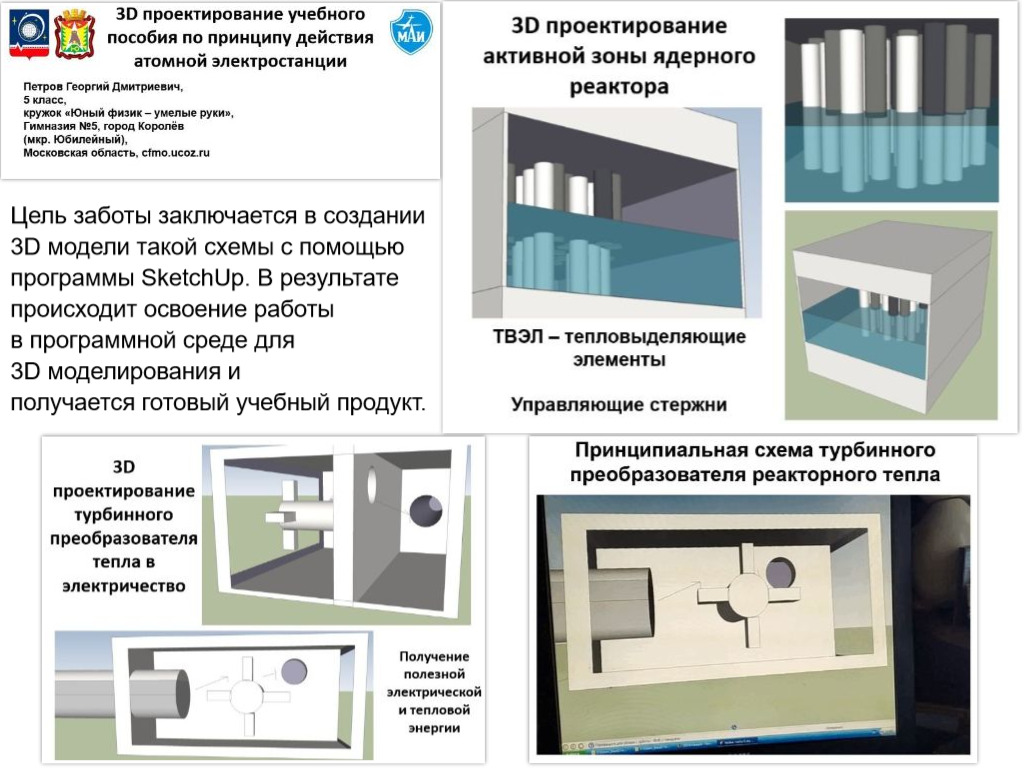

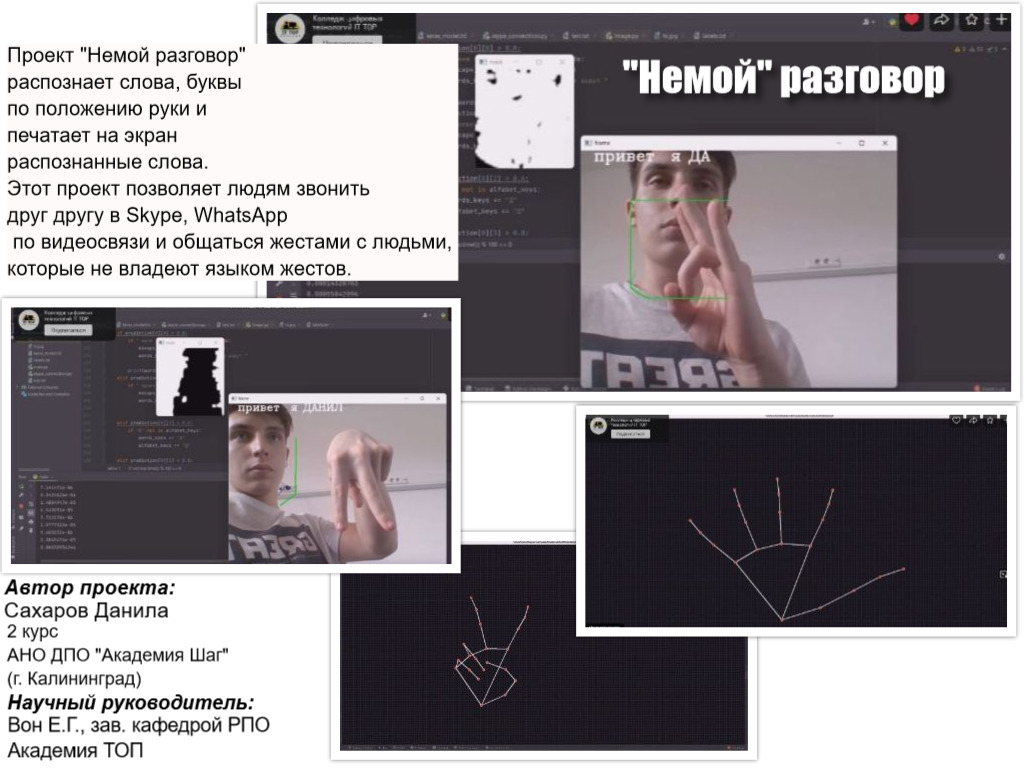
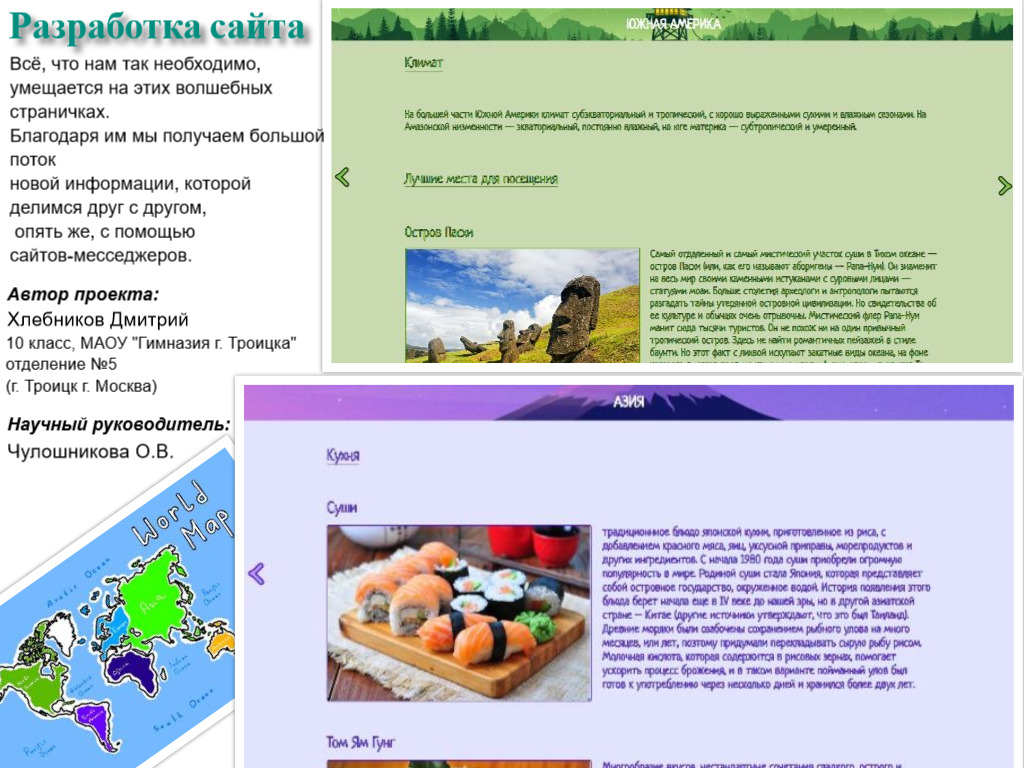
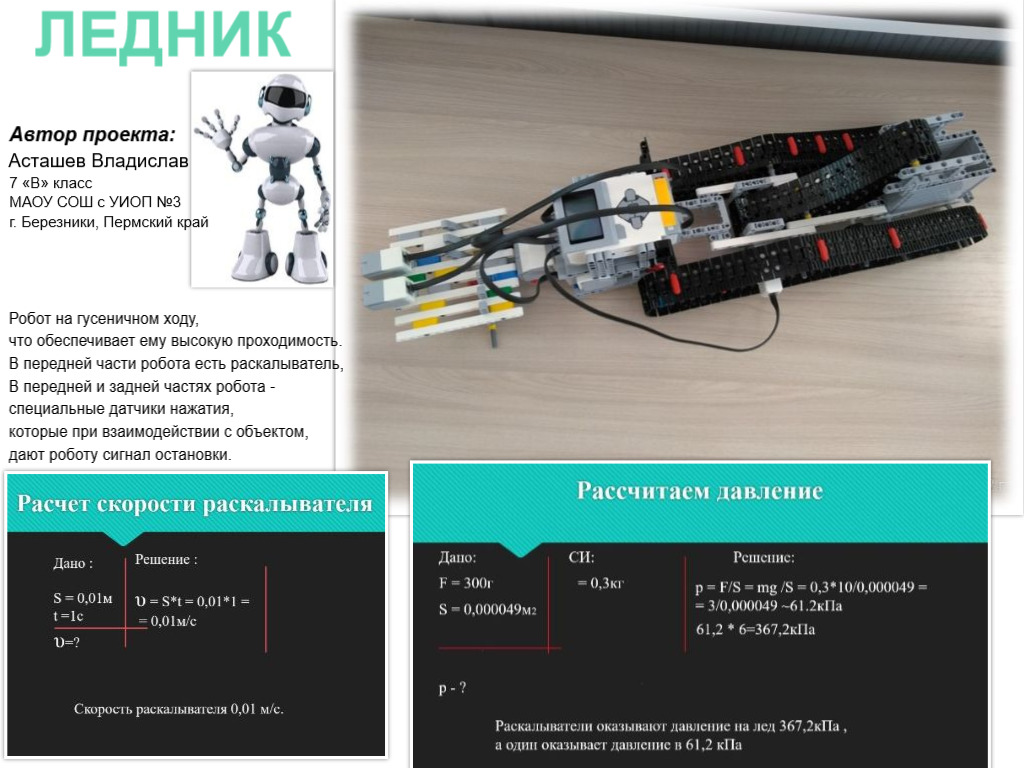

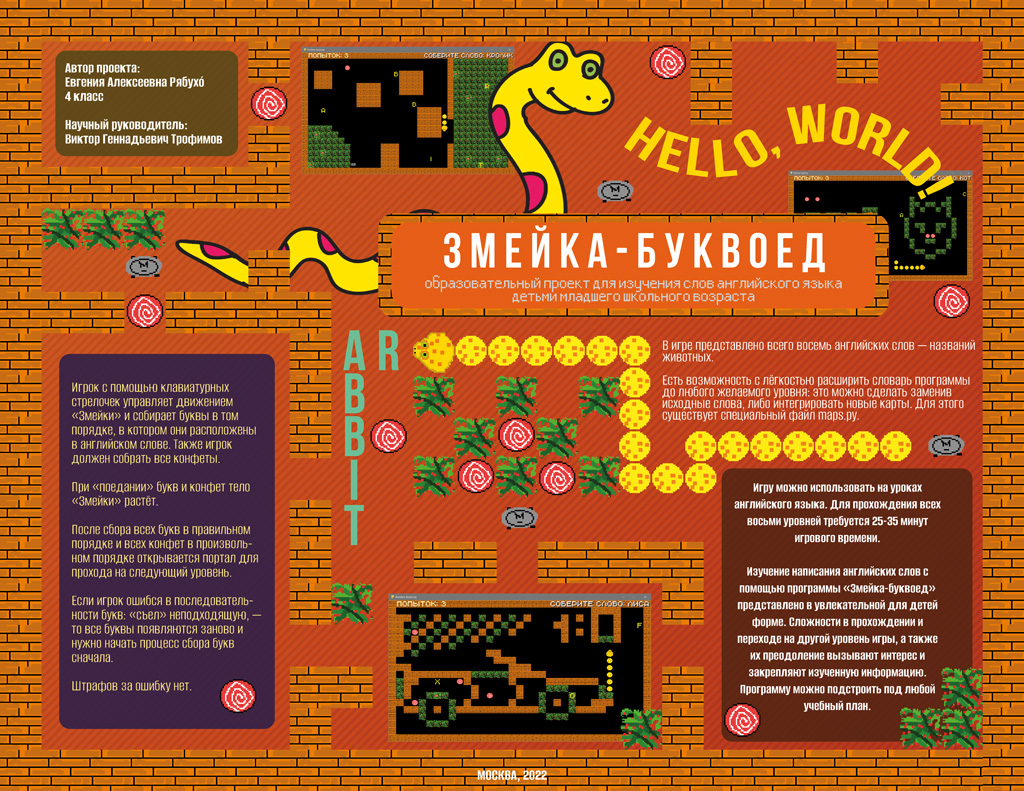
.jpg)

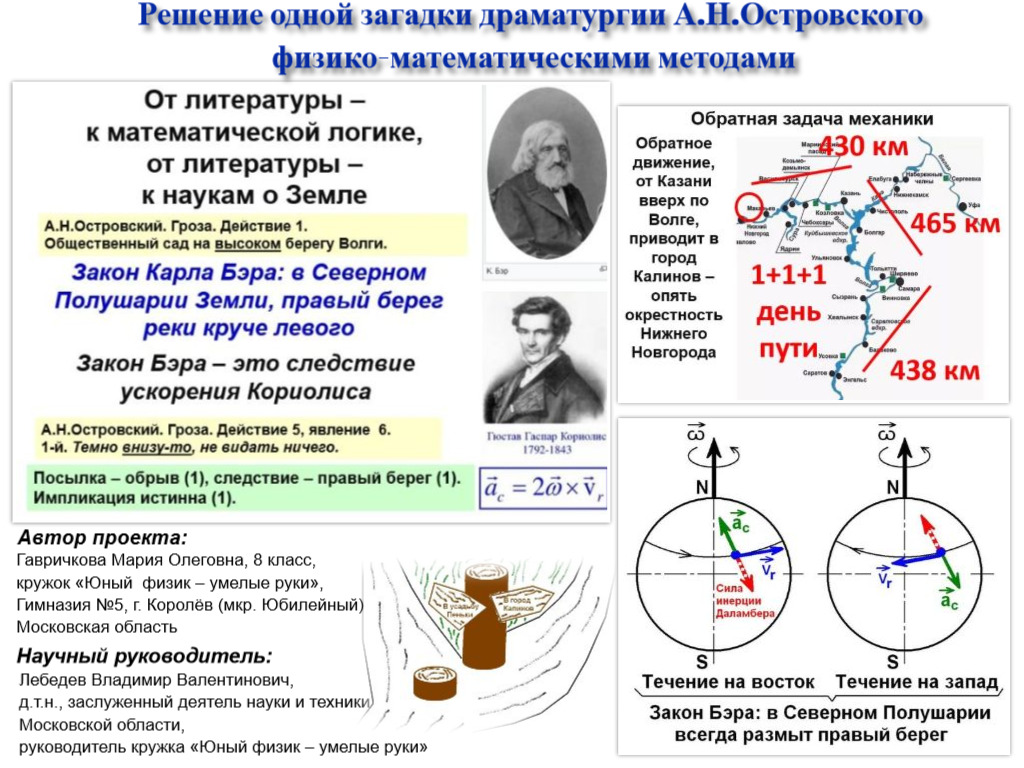
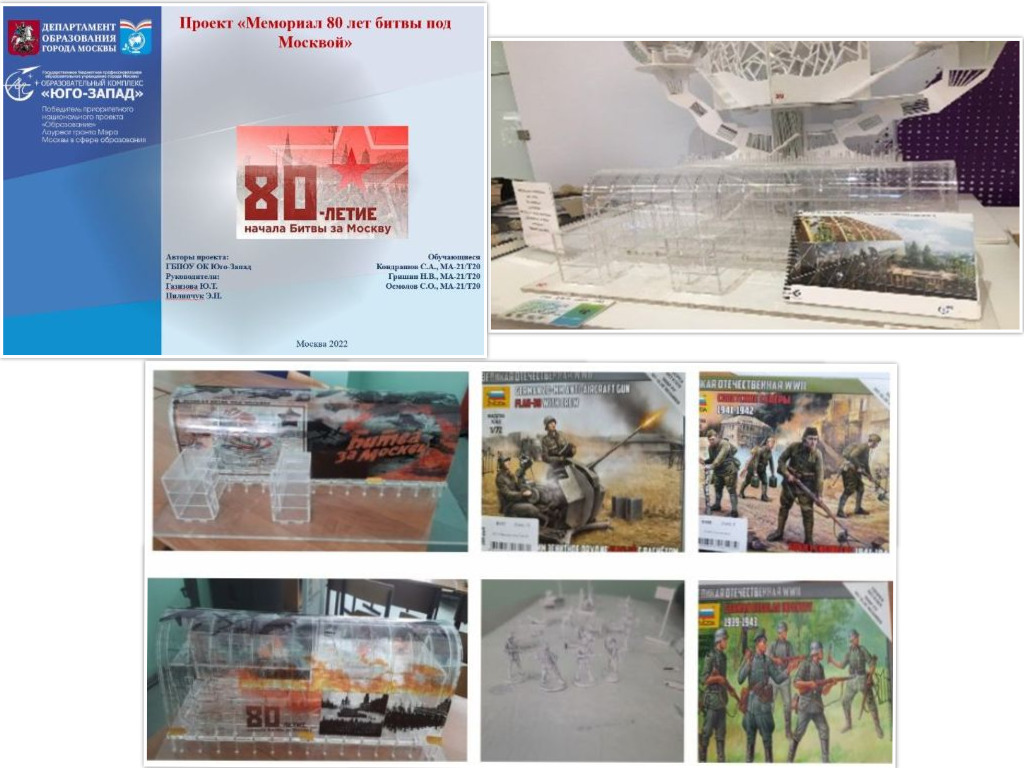





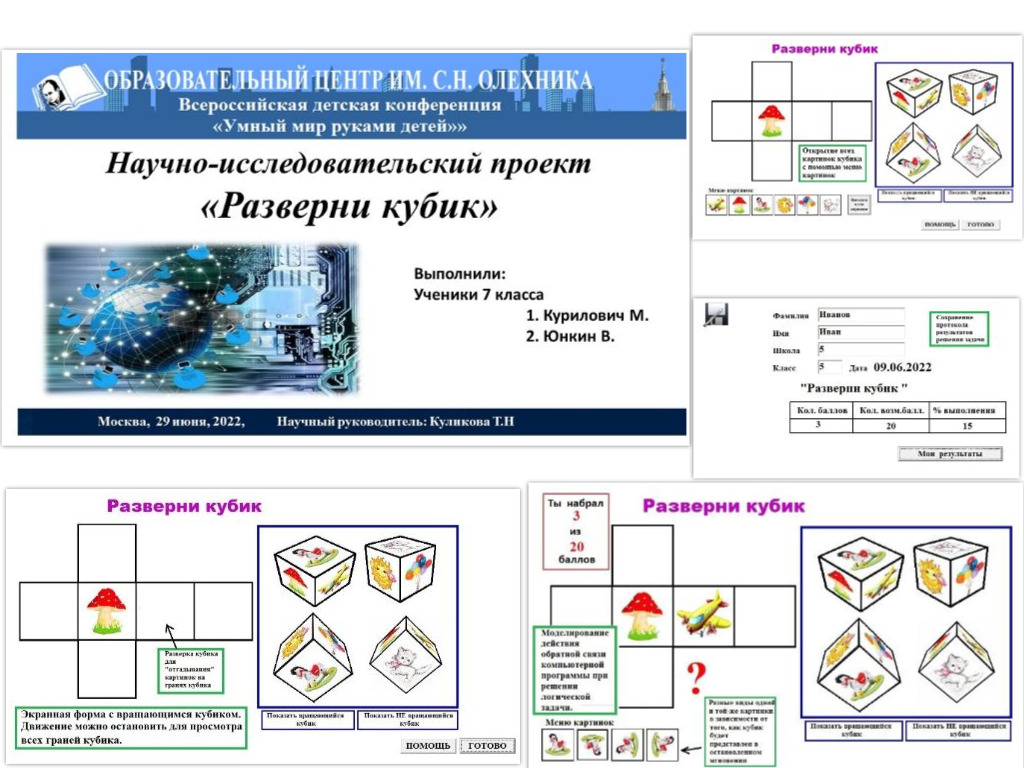
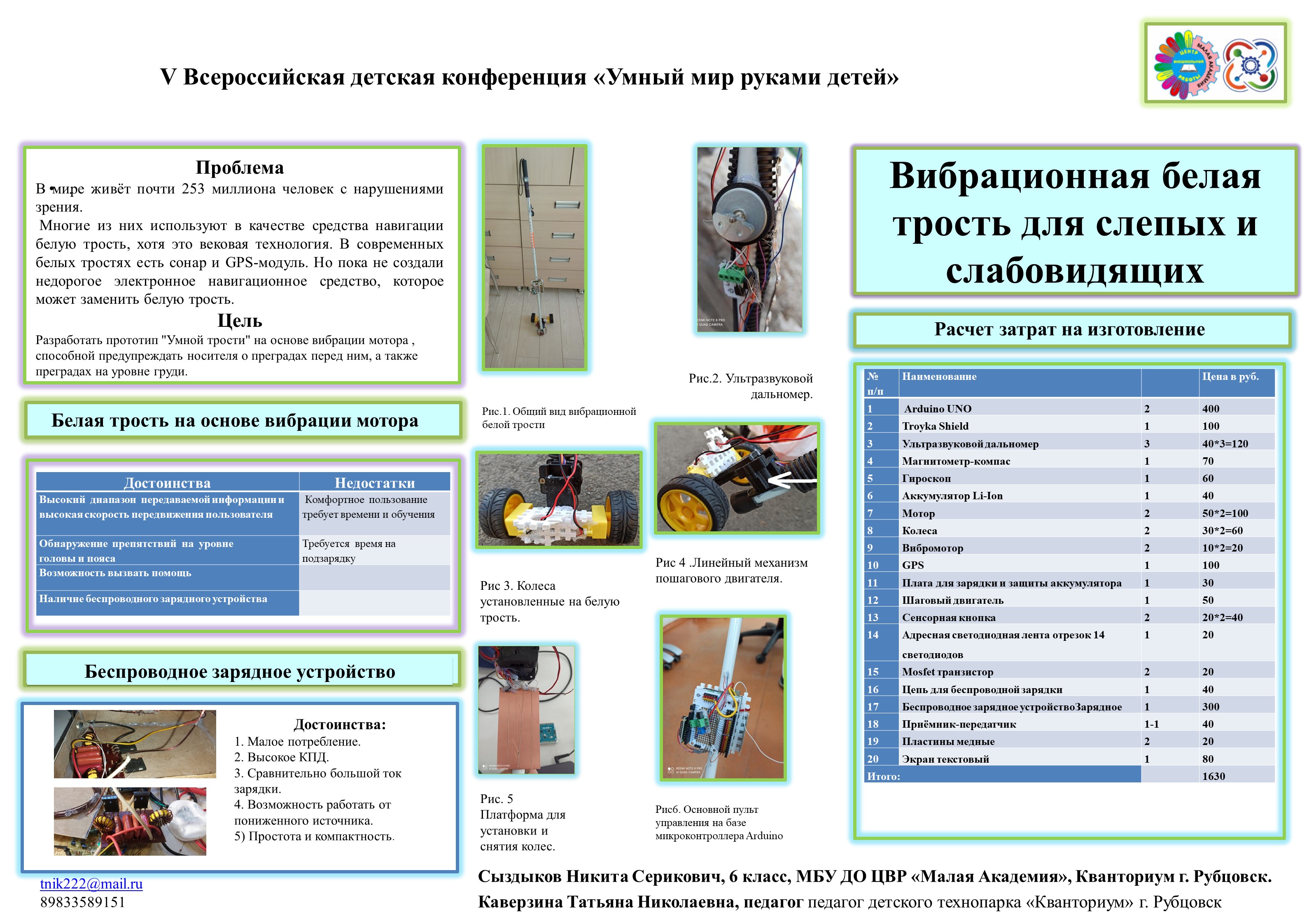

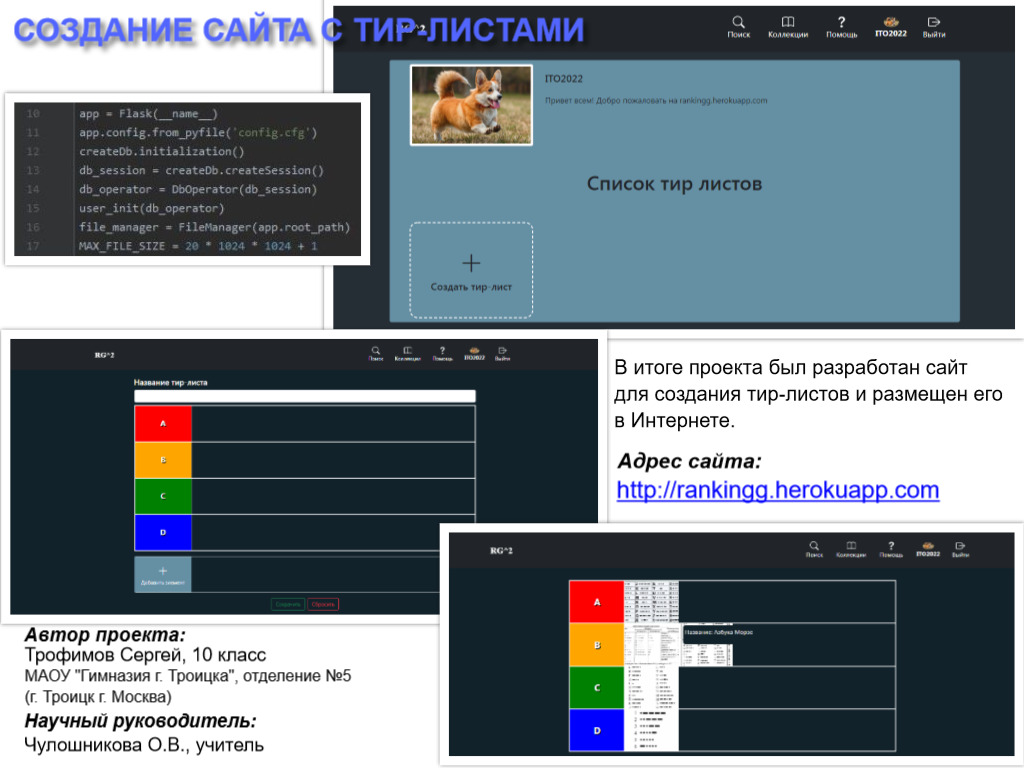
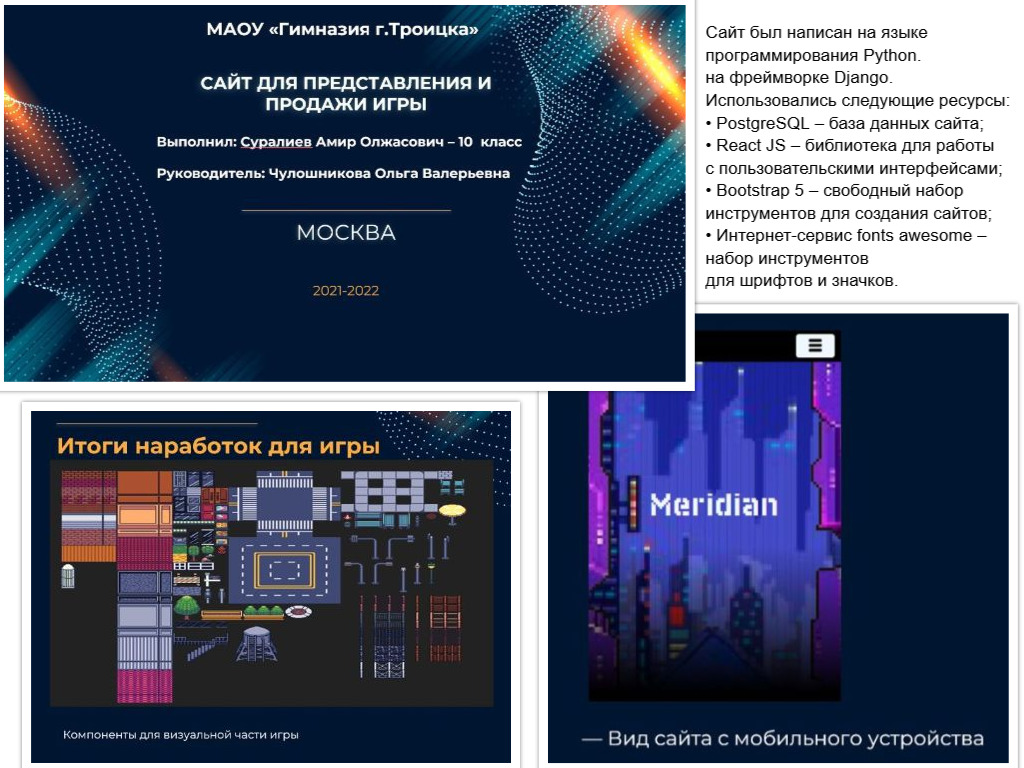

.jpg)


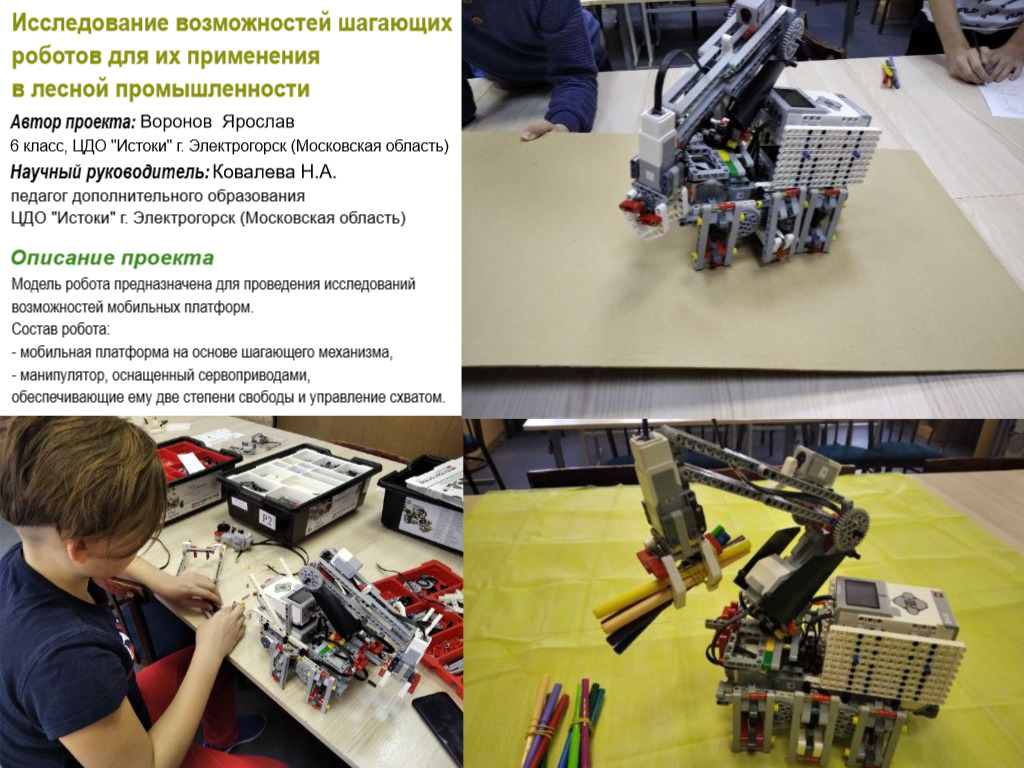
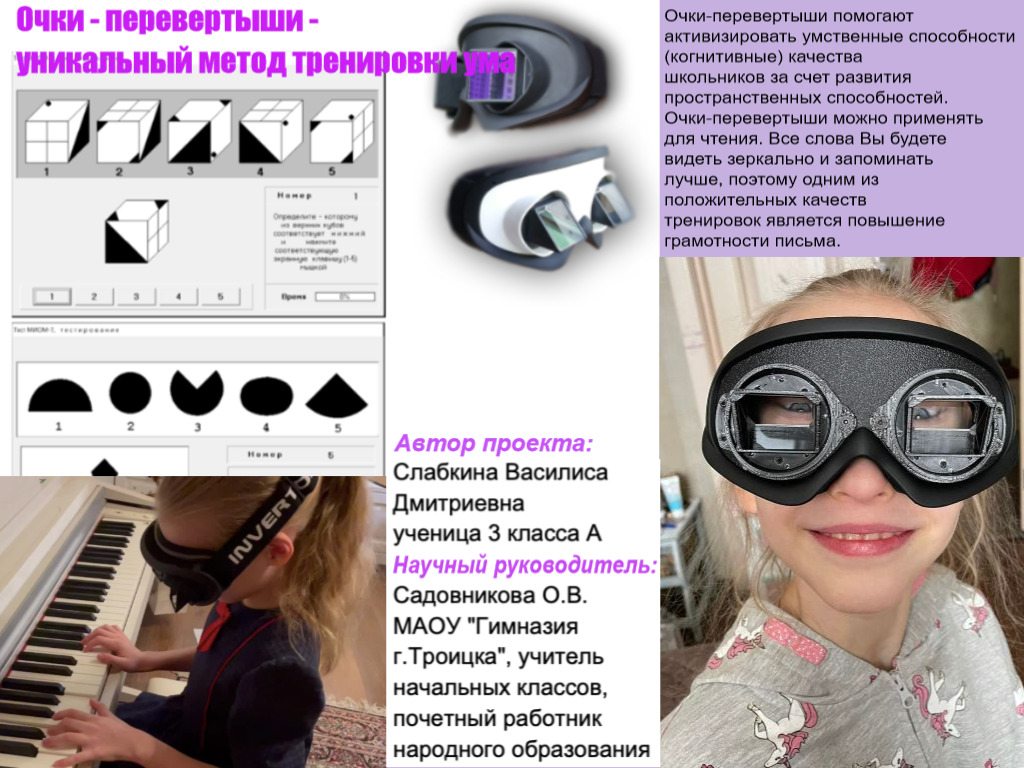

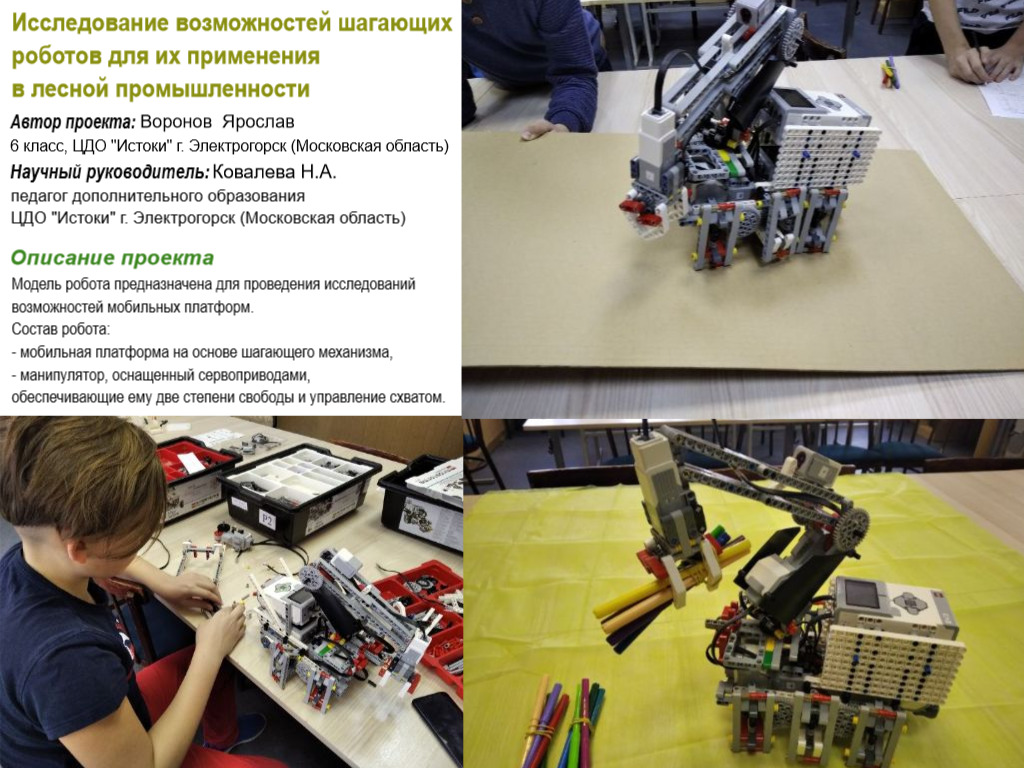
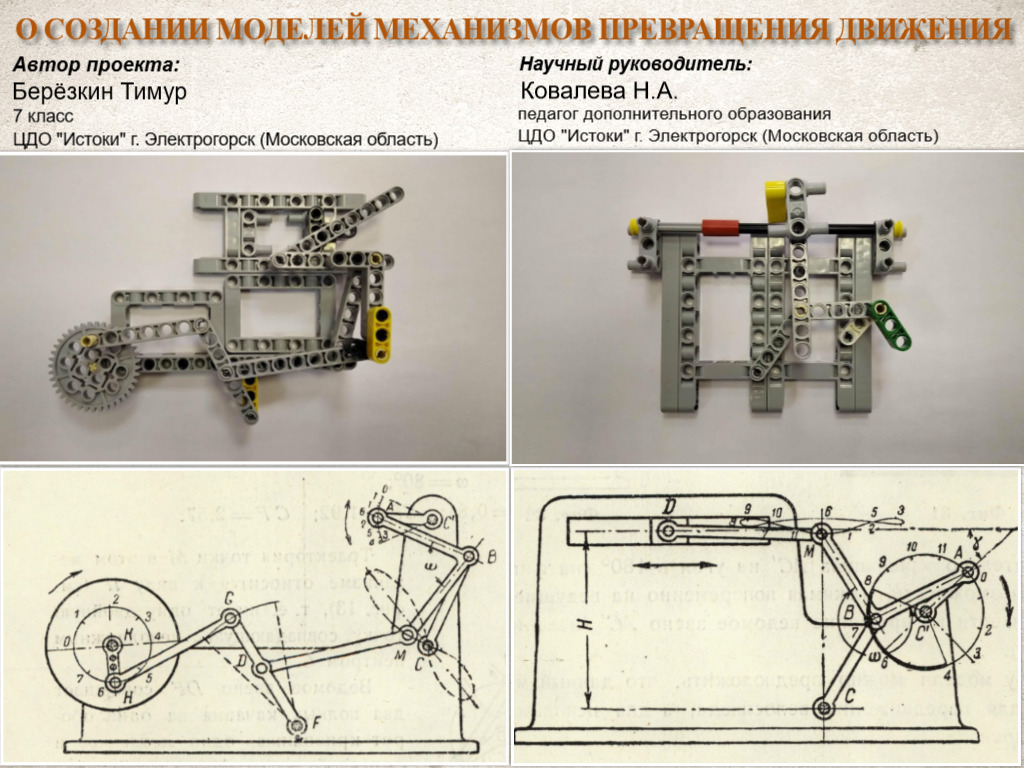
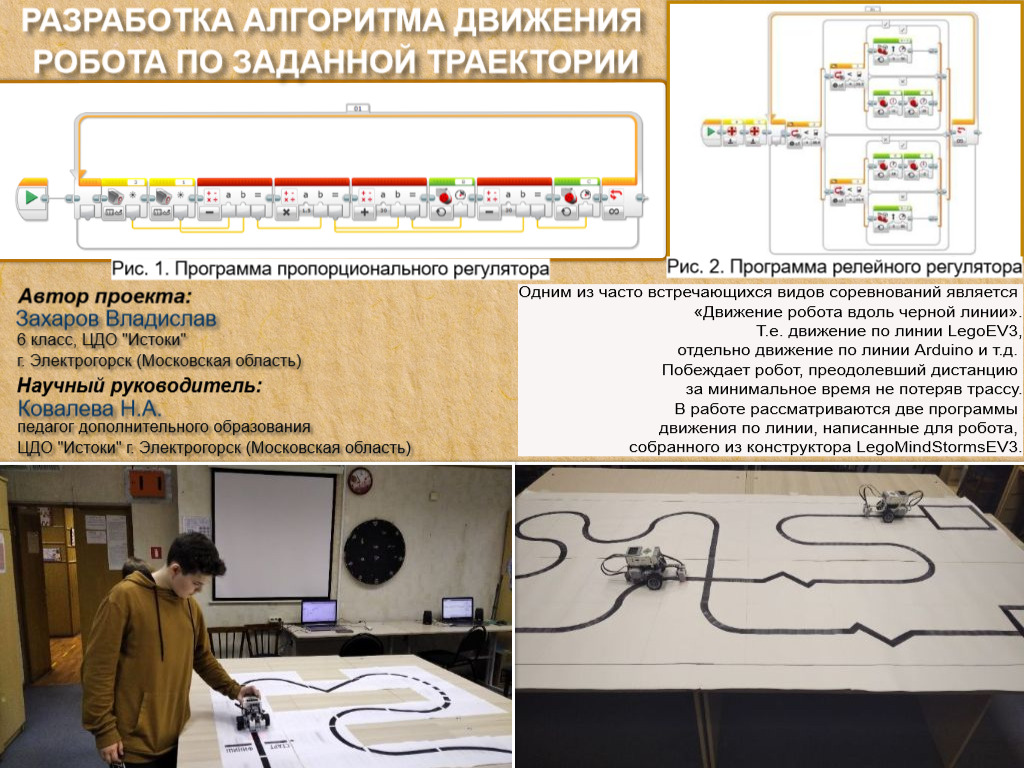
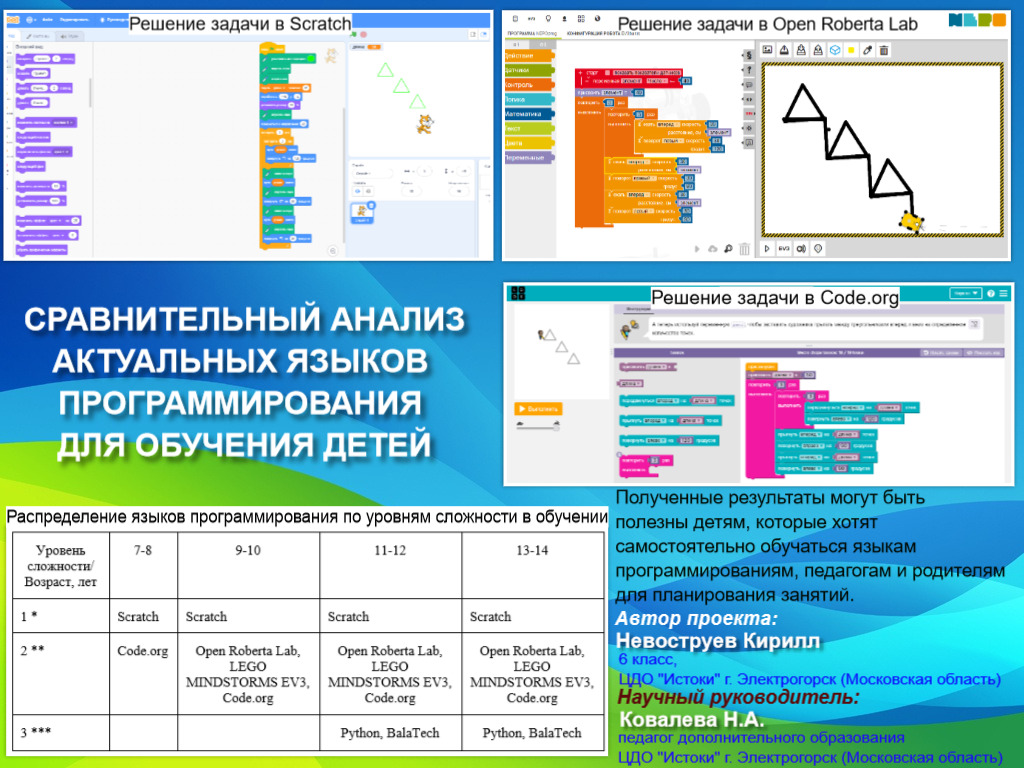
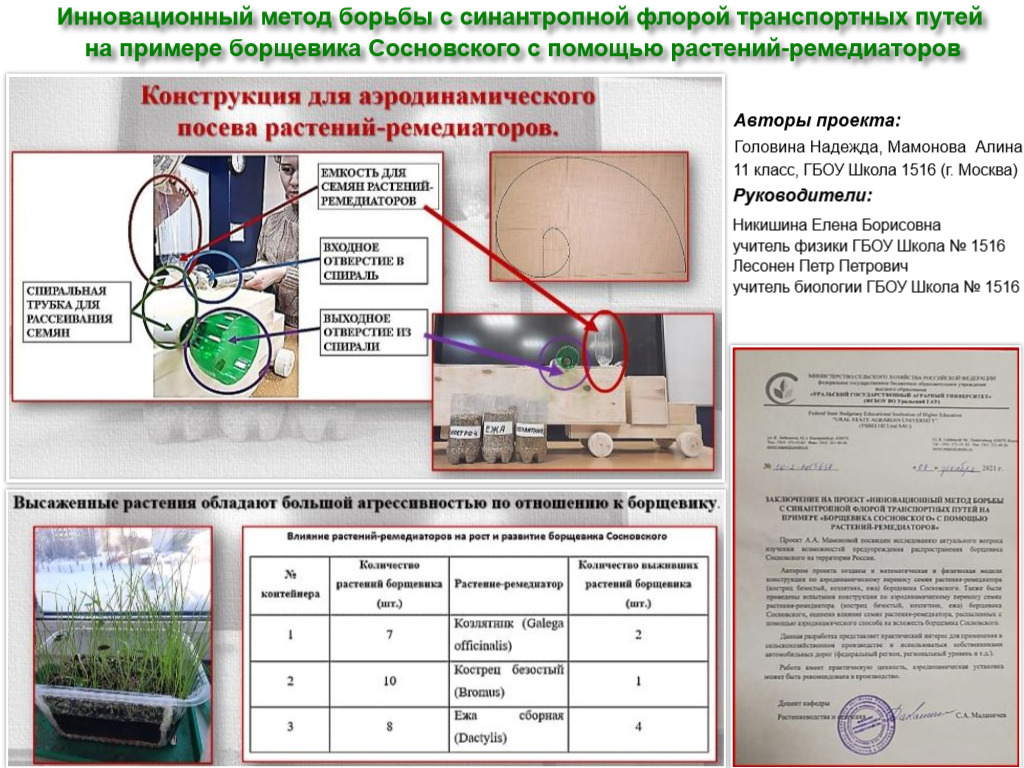
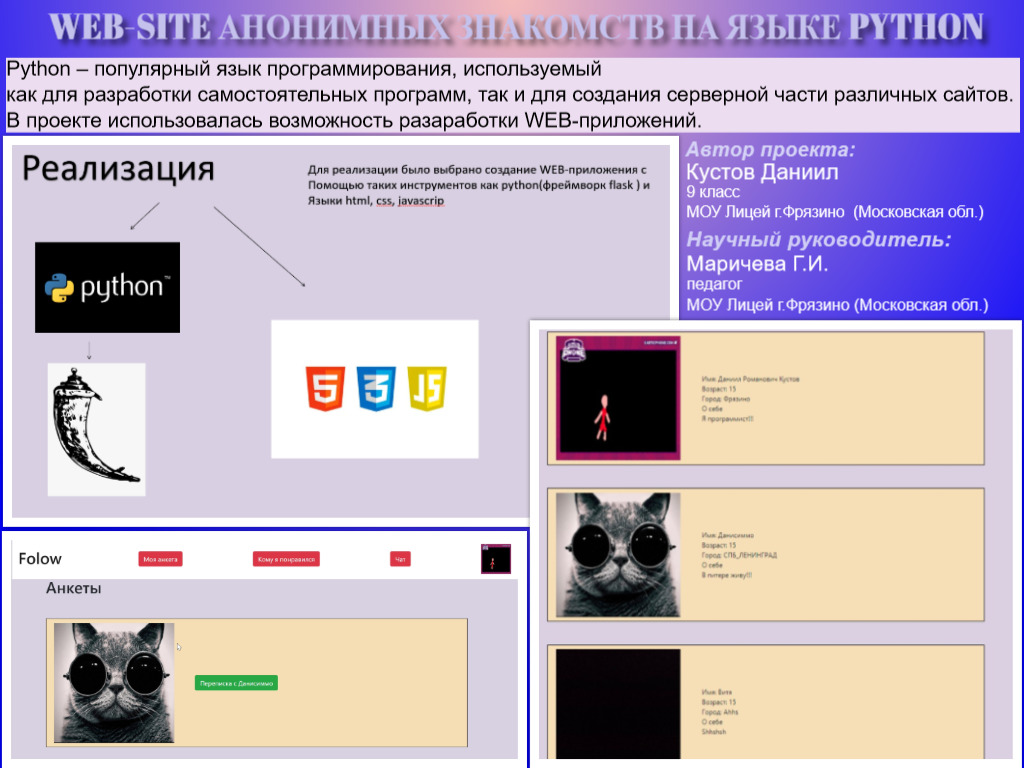



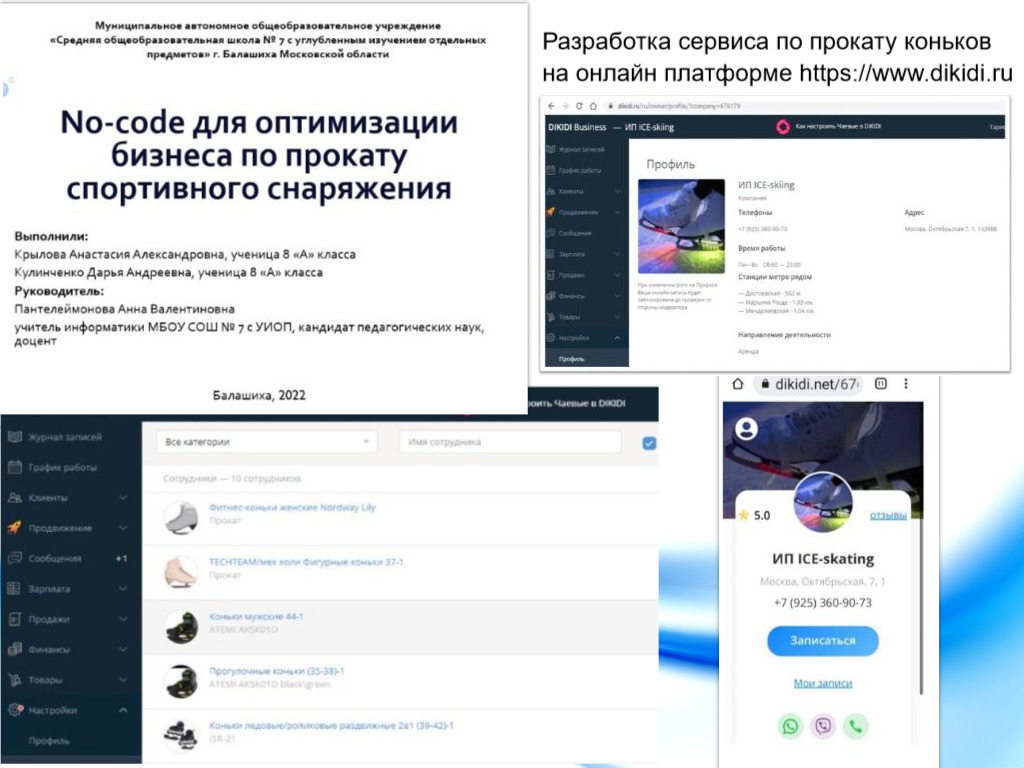



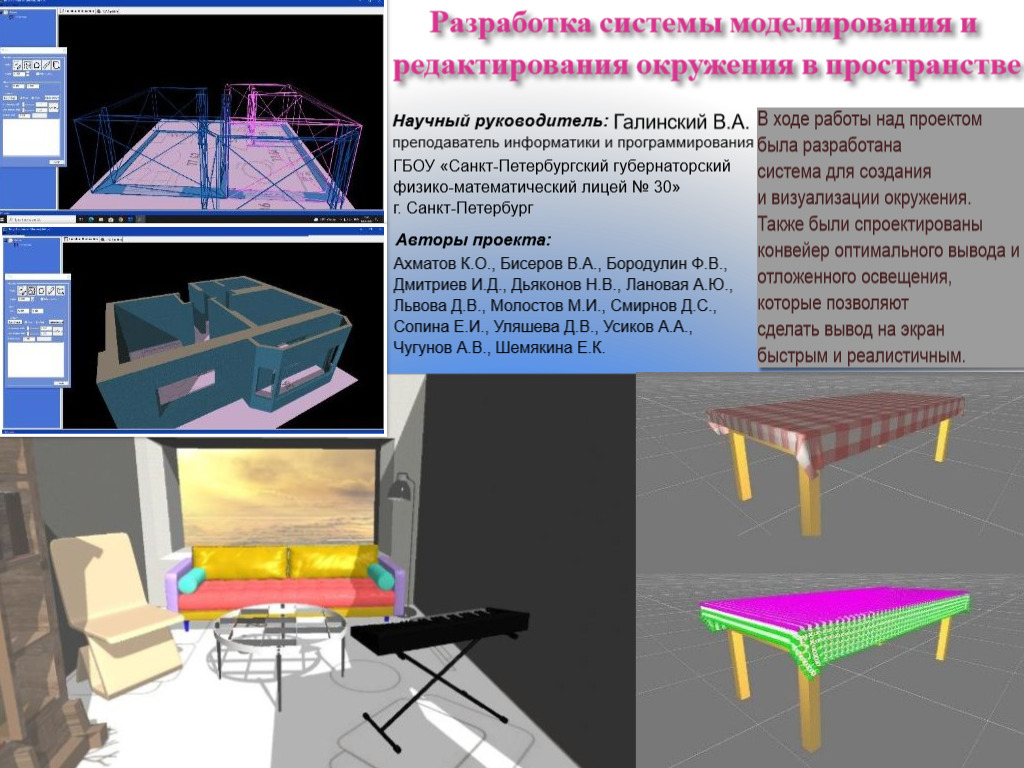
.jpg)