Арктический роботизированный вездеход на базе учебного конструктора

- Автор(ы): Середкин Матвей
- Научный руководитель: Коваленко Е.В., педагог робототехники ЦДО "IT-CLUB " Мехатроника"
- Учебное заведение: МАОУ "Гимназия №42", г. Кемерово
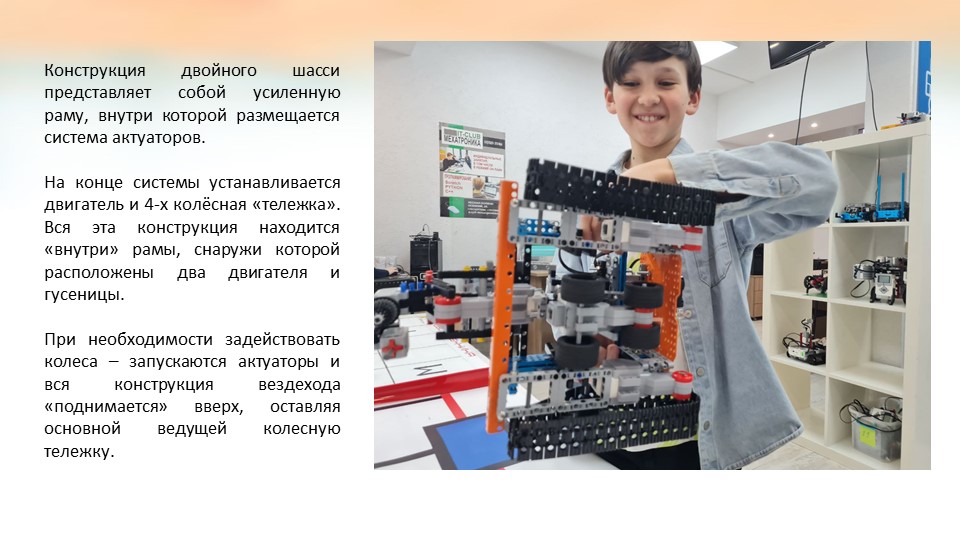
Мы попытались создать арктический вездеход на базе обычных детских образовательных конструкторов. Первоначально в качестве основы идеи создания была разработка двойного шасси, дающего возможность перемещения как на гусеничном, так и на колесном ходу.
Однако, в дальнейшей работе мы поняли, что наша разработка имеет множество вариаций применения. Например, наш вездеход станет серьезным помощником при строительстве ЛЭП, до-рог, вышек сотовой связи и других линейных объектов, где требуется следовать по бездорожью.
Полагаем, что в дальнейшем устройство может быть пересобрано и доработано от идеи до опытного образца!